Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Specific impulse wikipedia , lookup
Coriolis force wikipedia , lookup
Old quantum theory wikipedia , lookup
Brownian motion wikipedia , lookup
Center of mass wikipedia , lookup
Fictitious force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Classical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Mass versus weight wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Hooke's law wikipedia , lookup
Seismometer wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
1206 - Concepts in
Physics
Monday, November 16th 2009
Notes
• Don’t forget assignment #6 is due this
Wednesday after class (no later than
NOON)
• Graham will discuss the rest of the
midterm and assignment # 5 in the tutorial
today
Please pick up assignments:
#1:
Rochelle Desroches
Martina Greco
Spencer Phillips
Jasmine Rate
Zacharie Roitner
Joshua Sloan
Lauren Wellman
#2:
Nosizo Jannet Ndebele
#3:
Carmen Alderdice
Amber Appleby
Keala Carroll
Amy Ilich
Jerry Janik
Kersey Kalubi
Randy M’Grath
Francis Newton
Spencer Phillips
Zacharie Roitner
Krystal Siebert
Stuart Spencer
Philip Stringer
Elysia Wismer
#4:
Candance Ball
Jacob Costanzi
Kerann Hutchinson
Randy M’Grath
Spencer Phillips
Jasmine Rate
Krystal Siebert
Jordan Stephenson
Philip Stringer
Lauren Wellman
Jazmyne Woolley
Simple Harmonic Motion
We have talked about springs before and will use them now to introduce simple
harmonic motion. Springs are used in many applications, such as push-button
switches, automobile suspension systems, mattresses, and so on ...
We also learned before, that for relatively small displacements, the force FS required
to stretch or compress the spring is directly proportional to the displacement x. This
proportionality may be may be converted into an equation by using a proportionality
constant k (called spring constant, describing the “stiffness” of a spring): FS = kx
A spring behaving like that is called and ideal spring.
Example: A tire pressure gauge
In a tire pressure gauge, the air in the tire pushes against a plunger attached to a spring
when the gauge is pressed against the tire valve. Suppose the spring constant is
k=320 N/m and the bar indicator of the gage extends 2.0 cm
when the gauge is pressed against the tire valve. What force
does the air in the tire apply to the spring?
We assume that the spring is an ideal spring, so that the
relation F = kx is obeyed. The spring constant k is known
and so is the displacement x. Therefore, we can determine
the force applied to the spring.
F = kx = (320 N/m)(0.020 m) = 6.4 N
Hooke’s Law
To stretch or compress a spring, a force must be applied to it. In accord with
Newton’s third law, the spring exerts an oppositely directed force of equal
magnitude. This reaction force is applied to the spring to the agent that does the
pulling or pushing. In other words, the reaction force is applied to the object attached
to the spring. The reaction force is also called restoring force, since it brings the
spring back into it’s original position.
HOOKE’S LAW - RESTORING FORCE OF AN IDEAL SPRING
The restoring force of an ideal spring is F = -kx
where k is the spring constant and x is the displacement of the spring from its
unstrained length. The minus sign indicates that the restoring force always points in a
direction opposite to the displacement of the spring.
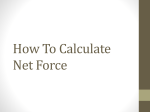
One example for the restoring force of springs is a
trampoline - you compress the springs going in - and the
restoring force will lift you up into the air.
The restoring force is shown if form of the
blue arrows, it is produced by an ideal spring
and always points opposite to the
displacement x (green arrows). This causes a
back-and-force movement of the spring.
When the restoring force has the
mathematical form given by F = -kx, the type
of friction-free motion illustrated, we call
this a simple harmonic motion.
To start quantifying the simple harmonic
motion, let’s look at the figure on the bottom
left. We track the movement over time and
by doing so end up with a sinusoidal shape
(which means it has a trigonometric sine or
cosine function). The maximum excursion
from the equilibrium is called the
amplitude A of the motion.
This figure has a lot of information,
we will go through the several parts
in the next few slides and see how to
get there.
For now just a list:
Amplitude A -- maximal excursion
Period T -- Time for one “sine” or “cosine”
Frequency -- inverse of the period
Note! Development over time is the important point here ...
Some more details:
displacement
velocity
acceleration
Notice that at the endpoints, when v = 0, the mass has no kinetic energy,
KE = ½mv2. Therefore, all of its energy is in the form of elastic potential energy,
PEe = ½kx2. When PEe is maximum, the restoring force within the spring is also
maximized resulting in the mass' acceleration also being maximized as the spring
acts to return the mass to its equilibrium position.
There are two formulas at our disposal to quantify the restoring force within the
spring as it oscillates: Newton's 2nd Law, net F = ma, and Hooke's Law, F = - ks:
We can use this to determine the acceleration: ma = -ks --> a = -(k/m)s
This results tells us that the mass' instantaneous acceleration is directly
proportional to, but in the opposite direction as, its instantaneous displacement.
To help us understand the substitution which we will need to use next, we are going
to return to some relationships which we learned for uniform circular motion.
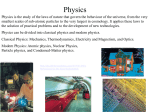
imagine the little purple mass attached to a rotating turn table. The purple mass is moving
in uniform circular motion and therefore the path is called a reference circle. As the
mass moves, its shadow falls on a strip of film, which is moving upward at a steady rate and
records where the shadow is. The pattern suggests that the shadow of the mass is a good
model for simple harmonic motion. This will help us some on the important relations.
Displacement
A
A
light blue = 1 cycle
corresponds in
time to
T = 1 period
-A
The reference circle has radius A (amplitude) and indicates how to determine the
displacement. Since the circular motion is uniform, the mass moves through the angle
Φ in a time t. It also moves with a constant angular speed ω (in rad/s). Therefore, the
angle has a value (in rad) of Φ = ωt. The displacement x of the shadow is just the
projection of the radius A onto the x-axis:
x = A cosϕ = A cos(ωt) = x
Period T
As the mass moves one revolution or cycle around the reference circle, its shadow
executes one cycle of back-and-force motion. For any object in simple harmonic
motion, the time required to complete on cycle is the period T. The value of T depends
on the angular speed ω of the mass because the greater the angular speed, the shorter
the time it takes to complete on revolution. The angular speed is defined as ΔΘ/Δt,
where ΔΘ is the angular displacement and Δt is the elapsed time. For a full circle (one
cycle or revolution) we have ΔΘ=2π and Δt=T, therefore:
ω = 2π/T
(ω in rad/s)
On many occasions it is more convenient to speak of the frequency f of the motion,
the frequency just being the number of cycles of the motion per second. For example,
if an object on a spring complete 10 cycles in one second, the frequency is f = 10
cycles/s. The period of time for one cycle, would be 1/10s. Thus, frequency and period
are related according to
f = 1/T
Usually on cycle per second is referred to as one hertz (Hz), the unit being named
after Heinrich Hertz (1857-1894). We can combine the relationships to find the angular
speed
ω = 2π/T = 2πf
Velocity
The reference circle model can also be used to determine the velocity of an object in
simple harmonic motion. If we go back to the reference circle, we remember the
tangential velocity vT. The velocity v of the shadow is just the x component of the vector
vT; that is v = -vT sinΘ. The minus sign is necessary, since v points in the direction of the
negative x axis. The tangential speed is related to the angular speed by vT = rω. Since the
radius of the reference circle is the amplitude A, it follows that vT = Aω.
Therefore the velocity in simple harmonic motion is: v = -Aω sinΘ = -A ω sin(ωt)
The velocity is not constant, but varies between maximum and minimum values as time
passes. When the shadow changes direction at either end of the oscillatory motion, the
velocity is momentarily zero. When the shadow passes through the x = 0m position, the
velocity has a maximum magnitude of vmax = Aω (this comes from the sine function
being between -1 and +1.
Example:
The diaphragm of a loudspeaker moves back and forth in simple harmonic motion to
create sound. The frequency of the motion is f = 1.0 kHz and the amplitude is
A = 0.20 mm. (a) What is the maximum speed of the diaphragm?
(b) Where in the motion does the maximum speed occur?
The maximum speed vmax of an object vibrating in simple harmonic motion is
vmax = Aω (ω in rad/s). The angular frequency ω is related to the frequency f by
ω=2πf
(a) Using the two relations above, we fine that the maximum speed of the vibrating
diaphragm is vmax = Aω = A(2πf) = (0.20 x 10-3 m)(2π)(1.0 x 103 Hz) = 1.3 m/s.
(b) The speed of the diaphragm is zero when the diaphragm momentarily comes to
rest at either end of its motion: x = +A and x = -A. Its maximum speed occurs
midway between these two positions, or at x = 0m.
Example:
Over the entrance to a restaurant is mounted a strip of equally spaced light bulbs.
Starting at the left end, each bulb turns on in sequence for one-half second. Thus, a
lighted bulb appears to move from left to right. Once the apparent motion of the
lighted bulb reaches the right side of the sign, the motion reverses. The lighted bulb
then appears to move to the left. Therefore the lighted bulb appears to oscillate back
and forth. Is the apparent motion simple harmonic motion?
Reminder: Simple harmonic motion is not just any kind of vibratory motion. It is a
very specific kind and must follow the relations (for displacement, velocity,
acceleration) discussed in the last couple of slides.
YOUR TURN - what do you think?
Example:
Over the entrance to a restaurant is mounted a strip of equally spaced light bulbs.
Starting at the left end, each bulb turns on in sequence for one-half second. Thus, a
lighted bulb appears to move from left to right. Once the apparent motion of the
lighted bulb reaches the right side of the sign, the motion reverses. The lighted bulb
then appears to move to the left. Therefore the lighted bulb appears to oscillate back
and forth. Is the apparent motion simple harmonic motion?
Reminder: Simple harmonic motion is not just any kind of vibratory motion. It is a
very specific kind and must follow the relations (for displacement, velocity,
acceleration) discussed in the last couple of slides.
Since the bulbs are equally spaced and each bulb remains lit for the same amount of
time, the apparent motion of a lighted bulb across the sign occurs at constant speed.
If the motion were simple harmonic motion, however, it would not have a constant
speed, it would have zero speed at each end of the sign and increase to a maximum
speed at the center of the sign. Therefore, although the apparent motion of a lighted
bulb is oscillatory, it is not a simple harmonic motion.
Acceleration:
Remember:
centripetal acceleration
is change in direction
and points towards the
center of the circle.
Since velocity in simple harmonic
motion is not constant, there must
be an acceleration. We can once
again use the reference circle to
determine this acceleration. A mass
“moving” around the circle in
uniform motion has a centripetal
acceleration aC that points toward
the center of the circle. The
acceleration a of the shadow is the x
component of the centripetal
acceleration a = -aC cosΘ. The minus
sign is needed because the
acceleration of the shadow points
“back”. The centripetal acceleration
is related to the angular speed ω by
aC = rω2 and the radius r is again
the amplitude A, so we can write
aC = Aω2 and the acceleration in
simple harmonic motion becomes
therefore: a = - Aω2 cos(ωt)
The acceleration (as the velocity)
does not have a constant value as
time passes: amax = Aω2
Example: loudspeaker, max. acceleration
The loudspeaker diaphragm is vibrating at a frequency of f = 1.0 kHz, and the
amplitudes of the motion is A = 0.20 mmm.
(a) What is the maximum acceleration of the diaphragm, and
(b) where does this maximum acceleration occur?
YOUR TURN ...
Example: loudspeaker, max. acceleration
The loudspeaker diaphragm is vibrating at a frequency of f = 1.0 kHz, and the
amplitudes of the motion is A = 0.20 mmm.
(a) What is the maximum acceleration of the diaphragm, and
(b) where does this maximum acceleration occur?
The maximum acceleration amax of an object vibrating in simple harmonic motion is
amax = Aω2 (ω in rad/s). The angular frequency is related to the frequency via ω=2πf.
(a) Find the maximal acceleration:
amax = Aω2 =A(2πf)2 = (0.20 x 10-3 m)[2π(1.0 x 103 Hz)]2 = 7.9 x 103 m/s2
This is an incredible acceleration, being more than 800 time the acceleration due to
gravity, this leads to some demands on the material for the diaphragm.
(b) The maximum acceleration occurs when the force acting on the diaphragm is a
maximum. This arises when the diaphragm is at the ends of its path, where the
displacement is greatest, therefore maximum acceleration occurs at x = +A and
x = -A
Frequency of vibration
We can use Newton’s second law (ΣF = ma) to determine the frequency at which an
object of mass m vibrates on a spring. We assume that the mass of the spring itself is
negligible and that the only force acting on the object in the horizontal direction is due to
the spring - that is, the Hooke’s law restoring force. Therefore the net force is ΣF = -kx,
and Newton’s second law becomes ma = -kx. The displacement x can be expressed as
x = A cos(ωt) and the acceleration as a = -Aω2 cos(ωt). Substituting these, we find:
-k A cos(ωt) = m(-Aω2 cos(ωt))
k/m = ω2
and thus
ω = sqrt(k/m)
where the angular frequency ω must be in radians per second. Larger spring constants k
and smaller masses m result in larger frequencies as the next example demonstrates.
We have now discussed all the
relations given in this figure ...
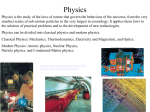
A body mass measurement device
Astronauts who spend long periods of time in orbit
periodically measure their body masses as part of their
helth-maintenance programs. On earth, it is simple to
measure body weight W with a scale an convert it to
mass m using acceleration due to gravity, since W=mg.
However, this procedure does not work in orbit,
because both the scale and the astronaut are if free fall
an cannot press against each other. Instead, astronauts
use a body mass measurement device (see picture).
This device consist of a spring-mounted chair in which the astronaut sits. The chair is then
started oscillating in simple harmonic motion. The period is measured electronically and is
automatically converted into a value of the astronaut’s mass, after the mass of the chair is
taken into account. The spring used in one such device has a spring constant of 606 N/m,
and the mass of the chair is 12.0 kg. The measured oscillation period is 2.41 s. Find the
mass of the astronaut.
The relation ω=sqrt(k/m) can be solved for the mass m in terms of the spring constant k
and the angular frequency ω. The spring constant is know and ω can be obtained from
the given period T = 2.41 s by using ω = 2π/T. The mass calculated that way will be the
total mass (astronaut plus chair), so we have to subtract the mass of the chair.
ω = 2π/T = sqrt(k/m) ---> m = kT2/4π2 = (606 N/m)(2.41 s)2/4π2 = 89.2 kg
mastronaut = 89.2 kg - 12.0 kg = 77.2 kg
Side note
The example on the previous slide shows that the mass of the
vibrating object influences the frequency of simple harmonic
motion. Electronic sensors are being developed that take
advantage of this effect in detecting and measuring small
amounts of chemicals. These sensors utilize tiny quartz
crystals that vibrate when an electric current passes through
them. If the crystal is coated with a substance that absorbs a
particular chemical, then its mass increases as the chemical is
absorbed and, according to the relation f = 1/2π sqrt(k/m),
the frequency of the simple harmonic motion decreases. The
change in frequency is detected electronically, and the sensor
is calibrated to give the mass of the absorbed chemical
Energy and simple harmonic motion
A couple of weeks ago, we have talked about potential energy and one of the part was the
elastic potential energy, which was defined as follows:
DEFINITION OF ELASTIC POTENTIAL ENERGY
The elastic potential energy PEelastic is the energy that a spring has by virtue of being stretched
or compressed. For an ideal spring that has a spring constant k and is stretched or
compressed by an amount x relative to its unstrained length, the elastic potential energy is
PEelastic = 1/2 kx2
SI unit of elastic potential energy is Joule (J)
Because of elastic potential energy, a stretched or compressed spring can do work on an
object that is attached to the spring. For example a mechanism for closing a door has a
spring - when the door is open, the spring inside is compressed and has elastic potential
energy. When the door is released, the compressed spring expands and does the work of
closing the door. To find an expression for the elastic potential energy, we will determine
the work done by the spring force on an object, which is defined as W = F s cosΘ (with F
the magnitude of the force, s the magnitude of the displacement s = x0 - xf and Θ the
angle between the force and the displacement). The Spring force is not constant, it changes
from kx0 to kxf. To determine the work, we can account for the changing magnitude by
using an average magnitude Favg in place of the constant magnitude F. Because the
dependence of the spring force on x is linear, the magnitude of the average force is just
one-half the sum of the initial and final values, or Favg = 1/2(kx0 + kxf).
The work Welastic done by the average spring force is, then,
Welastic = (Favg cosΘ)s = 1/2(kx0 + kxf) cos0° (x0 - xf) =
1/2 kx02 - 1/2 kxf2
(initial elastic potential energy minus final elastic potential energy
Reminder: Total mechanical energy is defined as
E = 1/2mv2 + 1/2Iω2 + mgh + 1/2kx2
Total mechanical energy = translational kinetic energy + rotational kinetic energy +
gravitational potential energy + elastic potential energy
Example: horizontal spring
An object of mass m = 0.200 kg is vibrating on a horizontal frictionless table. The spring
has a spring constant k = 545 N/m. It is stretched initially to x0 = 4.50 cm and then
released from rest. Determine the final translational speed vf of he object when the final
displacement of the spring is xf = 2.25 cm.
The conservation of mechanical energy indicates that, in the absence of friction (a
nonconservative force), the final and initial total mechanical energies are the same.
Since the object is moving on a horizontal table, the initial and final heights are the
same, so we don’t have to use gravitational potential energy. Since the object is not
rotating, we can eliminated these components from the equation as well. Therefore
Ef = E0 can be written in this particular case as 1/2mvf2 + 1/kxf2 = 1/2 kx02 (it started
from rest). This can be re-arranged for vf2 = k/m(x02 - xf2)
Since x0 = 0.0450 m and xf = 0.0225 m, the final translational speed is:
vf = sqrt{(545 N/m/0.200kg)[(0.0450 m)2 - (0.0225 m)2]} = 2.03 m/s
The total machanical energy at this point is partly translational kinematic and partly
elastic potential. Because the total mechanical energy remains constant, the value
equals the initial total mechanical energy when the object is stationary and the energy
is entirely elastic potential.
Example: changing mass
Imaging a box of mass m attached to a spring that has a force with constant k. The box
rests on a horizontal, frictionless surface. The spring is initially stretched to x = A and
then released from rest. the box then executes simple harmonic motion that is
characterized by a maximum speed vmax, an amplitude A, and an angular frequency ω.
When the box is passing through the point where the spring is unstrained ( x = 0 m) a
second box of the same mass m and speed vmax is attached to it. Discuss what happens
to (a) the maximum speed, (b) the amplitude, and (c) the angular frequency of the
subsequent simple harmonic motion.
YOUR TURN - try at home
Answers:
(a) same
(b) greater by factor sqrt(2)
(c) smaller by factor sqrt(2)
Example: A falling ball on a vertical spring
A 0.20-kg ball is attached to a vertical spring. The spring constant of the spring is 28 N/m.
The ball, supported initially so that the spring is neither stretched nor compressed, is
released from rest. In the absence of air resistance, how far does the ball fall before being
brought to a momentary stop by the spring?
Since air resistance is absent, only the conservative forces of gravity and the spring act on
the ball. Therefore, the principle of conservation of mechanical energy applies:
Ef = E0
with E = 1/2mv2 + 1/2Iω2 + mgh + 1/2kx2
The problem states that the final and initial translational speeds are zero. The ball and
spring do not rotate and the final height of the ball is zero. The spring in the beginning is
unstrained, so x0 = 0. So for this particular case, we have 1/2kxf2 = mgh0. So the initial
gravitational potential energy is converted into elastic potential energy. When the ball falls
to its lowest point, its displacement is xf = -h0, where the minus sign indicates that the
displacement is downward, therefore (substituting) we obtain h0 = 2mg/k.
h0 = 2mg/k = 2(0.20 kg)(9.8 m/s2)/(28 N/m) = 0.14 m