

MULTILINEAR ALGEBRA: THE EXTERIOR PRODUCT This writeup
... elementary divisor a2 is intrinsic to F and S as well, being the annihilator of a1 /a1 a2 . The argument for the remaining elementary divisors is more of the same, going up to F ∧m = Ae1 ∧ · · · ∧ em ⊕ · · · and S ∧m = a1 · · · am e1 ∧ · · · ∧ em . Note that m itself is described intrinsically as th ...
... elementary divisor a2 is intrinsic to F and S as well, being the annihilator of a1 /a1 a2 . The argument for the remaining elementary divisors is more of the same, going up to F ∧m = Ae1 ∧ · · · ∧ em ⊕ · · · and S ∧m = a1 · · · am e1 ∧ · · · ∧ em . Note that m itself is described intrinsically as th ...

Section 1.7 Solutions
... 7.1 Let X and Y be subspaces of a vector space V . We would like to show that X ∩ Y is a subspace of V . First, we recall that in set-builder notation X ∩ Y = {w : w ∈ X and w ∈ Y }. To show that X ∩ Y is nonempty, we note that since X and Y are vector spaces (since they are subspaces of V ) we know ...
... 7.1 Let X and Y be subspaces of a vector space V . We would like to show that X ∩ Y is a subspace of V . First, we recall that in set-builder notation X ∩ Y = {w : w ∈ X and w ∈ Y }. To show that X ∩ Y is nonempty, we note that since X and Y are vector spaces (since they are subspaces of V ) we know ...







Chapter 3 Kinematics in Two Dimensions
... A displacement vector has a magnitude of 175 m and points at an angle of 50.0 degrees relative to the x axis. Find the x and y components of this vector. ...
... A displacement vector has a magnitude of 175 m and points at an angle of 50.0 degrees relative to the x axis. Find the x and y components of this vector. ...

Oct. 3
... We define an operation that produces a matrix C by concatenating horizontally a given matrix A times the successive columns of another matrix B. We define such a concatenation involving A and B the product A times B, usually denoted AB. The operation that produces such a concatenation is called matr ...
... We define an operation that produces a matrix C by concatenating horizontally a given matrix A times the successive columns of another matrix B. We define such a concatenation involving A and B the product A times B, usually denoted AB. The operation that produces such a concatenation is called matr ...




General vector Spaces + Independence
... In the last chapter 2- and 3-space were generalized, and we saw that no new concepts arose by dealing with Rn . In a next step we want to generalize Rn to a general n-dimensional space, a vector space. Definition 1 Let V be a non empty set on which two operations, addition(⊕) and scalar multiplicati ...
... In the last chapter 2- and 3-space were generalized, and we saw that no new concepts arose by dealing with Rn . In a next step we want to generalize Rn to a general n-dimensional space, a vector space. Definition 1 Let V be a non empty set on which two operations, addition(⊕) and scalar multiplicati ...
Physics 20 Lesson 10 - Structured Independent Learning
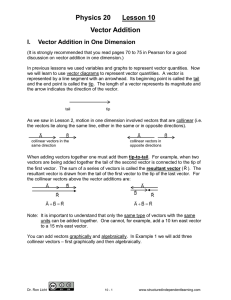
... II. Vector Addition in Two Dimensions (It is strongly recommended that you read pages 76 to 82 in Pearson for a good discussion on vector addition in two dimensions.) Vector addition in two dimensions is very similar to adding vectors in one dimension in that we use the tip-to-tail method. However, ...
... II. Vector Addition in Two Dimensions (It is strongly recommended that you read pages 76 to 82 in Pearson for a good discussion on vector addition in two dimensions.) Vector addition in two dimensions is very similar to adding vectors in one dimension in that we use the tip-to-tail method. However, ...




Document
... defined: addition, and multiplication by scalars. If the following axioms are satisfied by all objects u, v, w in V and all scalars k and m, then we call V a vector space and we call the objects in V vectors 1. If u and v are objects in V, then u + v is in V. 2. u + v = v + u 3. u + (v + w) = (u + v ...
... defined: addition, and multiplication by scalars. If the following axioms are satisfied by all objects u, v, w in V and all scalars k and m, then we call V a vector space and we call the objects in V vectors 1. If u and v are objects in V, then u + v is in V. 2. u + v = v + u 3. u + (v + w) = (u + v ...


1 Introduction Math 120 – Basic Linear Algebra I
... of the scalar product are collinear and since 1 > 0 it has the same direction of ~v , therefore a parallel vector of equal length, which by definition is equal to ~v . 6. We need to show that the two vectors have the same length and that they are parallel. Length:(Think about each step!) ||(kl)~v || ...
... of the scalar product are collinear and since 1 > 0 it has the same direction of ~v , therefore a parallel vector of equal length, which by definition is equal to ~v . 6. We need to show that the two vectors have the same length and that they are parallel. Length:(Think about each step!) ||(kl)~v || ...
Cross product

In mathematics and vector calculus, the cross product or vector product (occasionally directed area product to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R3) and is denoted by the symbol ×. The cross product a × b of two linearly independent vectors a and b is a vector that is perpendicular to both and therefore normal to the plane containing them. It has many applications in mathematics, physics, engineering, and computer programming. It should not be confused with dot product (projection product).If two vectors have the same direction (or have the exact opposite direction from one another, i.e. are not linearly independent) or if either one has zero length, then their cross product is zero. More generally, the magnitude of the product equals the area of a parallelogram with the vectors for sides; in particular, the magnitude of the product of two perpendicular vectors is the product of their lengths. The cross product is anticommutative (i.e. a × b = −b × a) and is distributive over addition (i.e. a × (b + c) = a × b + a × c). The space R3 together with the cross product is an algebra over the real numbers, which is neither commutative nor associative, but is a Lie algebra with the cross product being the Lie bracket.Like the dot product, it depends on the metric of Euclidean space, but unlike the dot product, it also depends on a choice of orientation or ""handedness"". The product can be generalized in various ways; it can be made independent of orientation by changing the result to pseudovector, or in arbitrary dimensions the exterior product of vectors can be used with a bivector or two-form result. Also, using the orientation and metric structure just as for the traditional 3-dimensional cross product, one can in n dimensions take the product of n − 1 vectors to produce a vector perpendicular to all of them. But if the product is limited to non-trivial binary products with vector results, it exists only in three and seven dimensions. If one adds the further requirement that the product be uniquely defined, then only the 3-dimensional cross product qualifies. (See § Generalizations, below, for other dimensions.)