
Semidirect Products - Mathematical Association of America
... the modem substitute for "permutes."And the term automorphism is just a shorthand for an isomorphism from the group to itself.) Our example suggests that we can merge operations for an external semidirect product if there is an action of one of the groups on the other. Here, finally, is the definiti ...
... the modem substitute for "permutes."And the term automorphism is just a shorthand for an isomorphism from the group to itself.) Our example suggests that we can merge operations for an external semidirect product if there is an action of one of the groups on the other. Here, finally, is the definiti ...



Slide 1
... Each nonzero value of x3 determines a nontrivial solution of (1). Hence, v1, v2, v3 are linearly dependent. Slide 1.7- 5 ...
... Each nonzero value of x3 determines a nontrivial solution of (1). Hence, v1, v2, v3 are linearly dependent. Slide 1.7- 5 ...



Lecture notes for Linear Algebra
... v = (α1 , α2 , . . . , αN ) where each αi ∈ F, n = 1, . . . , N . Addition in V is defined by adding the corresponding components: if v1 = (α1 , α2 , . . . , αN ) and v2 = (β1 , β2 , . . . , βN ) belong to V , then v1 + v2 = (α1 + β1 , α2 + β2 , . . . , αN + βN ) Scalar multiplication is defined by ...
... v = (α1 , α2 , . . . , αN ) where each αi ∈ F, n = 1, . . . , N . Addition in V is defined by adding the corresponding components: if v1 = (α1 , α2 , . . . , αN ) and v2 = (β1 , β2 , . . . , βN ) belong to V , then v1 + v2 = (α1 + β1 , α2 + β2 , . . . , αN + βN ) Scalar multiplication is defined by ...



8-queen backtrack
... A vector V is k-promising if, for every pair of integers i and j between 1 and k with i != j, we have V[i] - V[j] is-not-in {i-j, 0, j-i}. Solutions to the 8-queen correspond to vectors that are 8-promising. Prabhas Chongstitvatana ...
... A vector V is k-promising if, for every pair of integers i and j between 1 and k with i != j, we have V[i] - V[j] is-not-in {i-j, 0, j-i}. Solutions to the 8-queen correspond to vectors that are 8-promising. Prabhas Chongstitvatana ...




Chapter Two Notes: Mechanical Equilibrium
... A vector is the name we give to these arrows. A vector quantity is a quantity that needs both a magnitude and a direction to be complete. ...
... A vector is the name we give to these arrows. A vector quantity is a quantity that needs both a magnitude and a direction to be complete. ...
Lecture 9, basis - Harvard Math Department
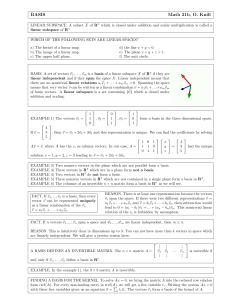
... 1) Two vectors on a line are linear dependent. One is a multiple of the other. 2) Three vectors in the plane are linear dependent. One can find a relation a~v 1 + b~v2 = ~v3 by changing the size of the lengths of the vectors ~v1 , ~v2 until ~v3 becomes the diagonal of the parallelogram spanned by ~v ...
... 1) Two vectors on a line are linear dependent. One is a multiple of the other. 2) Three vectors in the plane are linear dependent. One can find a relation a~v 1 + b~v2 = ~v3 by changing the size of the lengths of the vectors ~v1 , ~v2 until ~v3 becomes the diagonal of the parallelogram spanned by ~v ...




Cross product

In mathematics and vector calculus, the cross product or vector product (occasionally directed area product to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R3) and is denoted by the symbol ×. The cross product a × b of two linearly independent vectors a and b is a vector that is perpendicular to both and therefore normal to the plane containing them. It has many applications in mathematics, physics, engineering, and computer programming. It should not be confused with dot product (projection product).If two vectors have the same direction (or have the exact opposite direction from one another, i.e. are not linearly independent) or if either one has zero length, then their cross product is zero. More generally, the magnitude of the product equals the area of a parallelogram with the vectors for sides; in particular, the magnitude of the product of two perpendicular vectors is the product of their lengths. The cross product is anticommutative (i.e. a × b = −b × a) and is distributive over addition (i.e. a × (b + c) = a × b + a × c). The space R3 together with the cross product is an algebra over the real numbers, which is neither commutative nor associative, but is a Lie algebra with the cross product being the Lie bracket.Like the dot product, it depends on the metric of Euclidean space, but unlike the dot product, it also depends on a choice of orientation or ""handedness"". The product can be generalized in various ways; it can be made independent of orientation by changing the result to pseudovector, or in arbitrary dimensions the exterior product of vectors can be used with a bivector or two-form result. Also, using the orientation and metric structure just as for the traditional 3-dimensional cross product, one can in n dimensions take the product of n − 1 vectors to produce a vector perpendicular to all of them. But if the product is limited to non-trivial binary products with vector results, it exists only in three and seven dimensions. If one adds the further requirement that the product be uniquely defined, then only the 3-dimensional cross product qualifies. (See § Generalizations, below, for other dimensions.)