

1 - Mu Alpha Theta
... criterion. The answer is A. 12. The determinant is 2W - 4X, and the determinant is said to equal 10. if W+X = 8, then 4W + 4X = 32. Adding these two equations together shows that 6W = 42, or W = 7. Sine W+X=8, X =1. Therefore, WX = 7. The answer is B. 13. An orthogonal matrix B must satisfy BT = B-1 ...
... criterion. The answer is A. 12. The determinant is 2W - 4X, and the determinant is said to equal 10. if W+X = 8, then 4W + 4X = 32. Adding these two equations together shows that 6W = 42, or W = 7. Sine W+X=8, X =1. Therefore, WX = 7. The answer is B. 13. An orthogonal matrix B must satisfy BT = B-1 ...




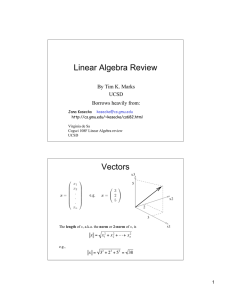
Linear Algebra Review Vectors By Tim K. Marks UCSD
... – D is an m × n diagonal matrix. Its diagonal elements, σ1, σ2, …, are called the singular values of A, and satisfy σ1 ≥ σ2 ≥ … ≥ 0. – V is an n × n orthonormal matrix ...
... – D is an m × n diagonal matrix. Its diagonal elements, σ1, σ2, …, are called the singular values of A, and satisfy σ1 ≥ σ2 ≥ … ≥ 0. – V is an n × n orthonormal matrix ...



LESSON 5 Vectors and Coordinate Geometry Analvtic aeometrv
... Given A(-2,O) B(O,4) C(5,2) D(3,-4) calculate: a) The magnitude of the following fixed vectors: Aa Rc c b 3 A M b) The gradient of the same vectors: c) The coordinates of the vectors: ...
... Given A(-2,O) B(O,4) C(5,2) D(3,-4) calculate: a) The magnitude of the following fixed vectors: Aa Rc c b 3 A M b) The gradient of the same vectors: c) The coordinates of the vectors: ...

DEPENDENT SETS OF CONSTANT WEIGHT VECTORS IN GF(q) 1
... the vectors u1 , u2 , . . . , um are linearly dependent tends to 0. As a final observation, we point out that since the eigenvectors ei do not depend upon k, the transition matrices corresponding to vectors of weight k and weight k 0 commute: this is not surprising, since this corresponds to the fac ...
... the vectors u1 , u2 , . . . , um are linearly dependent tends to 0. As a final observation, we point out that since the eigenvectors ei do not depend upon k, the transition matrices corresponding to vectors of weight k and weight k 0 commute: this is not surprising, since this corresponds to the fac ...

Vector Spaces - UCSB Physics
... The proofs of the above facts go beyond the scope of our course, but they are not that difficult and, if you will, you can try to find them yourselves, given the following hints. The triangle inequality directly follows from the simplest version of Cauchy-Bunyakovsky inequality, Eq. (41). To prove E ...
... The proofs of the above facts go beyond the scope of our course, but they are not that difficult and, if you will, you can try to find them yourselves, given the following hints. The triangle inequality directly follows from the simplest version of Cauchy-Bunyakovsky inequality, Eq. (41). To prove E ...


Lecture 20: Section 4.5
... independent; then by Theorem 4.5.2 (a), r ≤ n. If r = n, then the set S is a basis because it contains exactly n vectors. On the other hand, let {e1 , e2 , · · · , en } be a basis for V. If r < n, we consider adding vectors from {e1 , · · · , en } to S to enlarge the set of independent vectors. We s ...
... independent; then by Theorem 4.5.2 (a), r ≤ n. If r = n, then the set S is a basis because it contains exactly n vectors. On the other hand, let {e1 , e2 , · · · , en } be a basis for V. If r < n, we consider adding vectors from {e1 , · · · , en } to S to enlarge the set of independent vectors. We s ...

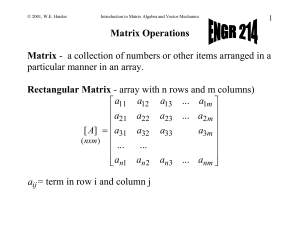
n-Dimensional Euclidean Space and Matrices
... The basic properties of 3 × 3 determinants remain valid for n × n determinants. In particular, we note the fact that if A is an n × n matrix and B is the matrix formed by adding a scalar multiple of the kth row (or column) of A to the lth row (or, respectively, column) of A, then the determinant of ...
... The basic properties of 3 × 3 determinants remain valid for n × n determinants. In particular, we note the fact that if A is an n × n matrix and B is the matrix formed by adding a scalar multiple of the kth row (or column) of A to the lth row (or, respectively, column) of A, then the determinant of ...



Document
... If S is a subspace of , then dim S dim S n Furthermore, if { x1 ,..., xr } is a basis for S and {xr 1 ,..., xn}is a basis for S , then { x1 ,..., xr , xr 1 ,..., xn} is a basis for n. ...
... If S is a subspace of , then dim S dim S n Furthermore, if { x1 ,..., xr } is a basis for S and {xr 1 ,..., xn}is a basis for S , then { x1 ,..., xr , xr 1 ,..., xn} is a basis for n. ...


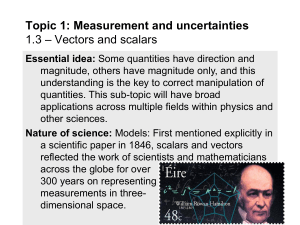


Cross product

In mathematics and vector calculus, the cross product or vector product (occasionally directed area product to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R3) and is denoted by the symbol ×. The cross product a × b of two linearly independent vectors a and b is a vector that is perpendicular to both and therefore normal to the plane containing them. It has many applications in mathematics, physics, engineering, and computer programming. It should not be confused with dot product (projection product).If two vectors have the same direction (or have the exact opposite direction from one another, i.e. are not linearly independent) or if either one has zero length, then their cross product is zero. More generally, the magnitude of the product equals the area of a parallelogram with the vectors for sides; in particular, the magnitude of the product of two perpendicular vectors is the product of their lengths. The cross product is anticommutative (i.e. a × b = −b × a) and is distributive over addition (i.e. a × (b + c) = a × b + a × c). The space R3 together with the cross product is an algebra over the real numbers, which is neither commutative nor associative, but is a Lie algebra with the cross product being the Lie bracket.Like the dot product, it depends on the metric of Euclidean space, but unlike the dot product, it also depends on a choice of orientation or ""handedness"". The product can be generalized in various ways; it can be made independent of orientation by changing the result to pseudovector, or in arbitrary dimensions the exterior product of vectors can be used with a bivector or two-form result. Also, using the orientation and metric structure just as for the traditional 3-dimensional cross product, one can in n dimensions take the product of n − 1 vectors to produce a vector perpendicular to all of them. But if the product is limited to non-trivial binary products with vector results, it exists only in three and seven dimensions. If one adds the further requirement that the product be uniquely defined, then only the 3-dimensional cross product qualifies. (See § Generalizations, below, for other dimensions.)