


Algebra 2 Notes
... 3. Solve the system. Then classify the system as consistent and independent, consistent and dependent, or inconsistent. -4x + y = 5 -4x + y = -2 ...
... 3. Solve the system. Then classify the system as consistent and independent, consistent and dependent, or inconsistent. -4x + y = 5 -4x + y = -2 ...

Ulrich bundles on abelian surfaces
... a line bundle M on X with χ(M ) = 0 satisfies c1 (M )2 = 0 by Riemann-Roch; since X is general, we have NS(X) = Z, hence M is algebraically equivalent to OX . Thus if L is an Ulrich line bundle, L(−1) and L(−2) must be algebraically equivalent to OX , a contradiction. On the other hand, some particul ...
... a line bundle M on X with χ(M ) = 0 satisfies c1 (M )2 = 0 by Riemann-Roch; since X is general, we have NS(X) = Z, hence M is algebraically equivalent to OX . Thus if L is an Ulrich line bundle, L(−1) and L(−2) must be algebraically equivalent to OX , a contradiction. On the other hand, some particul ...
Review of Vector Analysis
... Then we take the dot product of the vector field V at the position of the surface element with vector ds. The result is a differential scalar. The sum of these scalars over all the surface elements is the surface integral. ...
... Then we take the dot product of the vector field V at the position of the surface element with vector ds. The result is a differential scalar. The sum of these scalars over all the surface elements is the surface integral. ...

+ y - U.I.U.C. Math
... space E, integrable (in the sense of Bochner [3]), and such that 9Kp[^] = ( / l k ( 0 l | p * ) 1 / p is finite; the norm of x in L*{E} is4 Wlp[x]. Similarly, lp{E\ is the Banach space of sequences X= {xn} of elements of £ , such that WlP[X] = CCIWI*0 1 / p is finite, with Wlp[X] as the norm of X. I ...
... space E, integrable (in the sense of Bochner [3]), and such that 9Kp[^] = ( / l k ( 0 l | p * ) 1 / p is finite; the norm of x in L*{E} is4 Wlp[x]. Similarly, lp{E\ is the Banach space of sequences X= {xn} of elements of £ , such that WlP[X] = CCIWI*0 1 / p is finite, with Wlp[X] as the norm of X. I ...

Classification of Groups of Order n ≤ 8
... isomorphic, since the first is cyclic, while every non-identity element of the Klein-four has order 2. We will now show that any group of order 4 is either cyclic (hence isomorphic to Z/4Z) or isomorphic to the Klein-four. So suppose G is a group of order 4. If G has an element of order 4, then G is ...
... isomorphic, since the first is cyclic, while every non-identity element of the Klein-four has order 2. We will now show that any group of order 4 is either cyclic (hence isomorphic to Z/4Z) or isomorphic to the Klein-four. So suppose G is a group of order 4. If G has an element of order 4, then G is ...


NECESSARY AND SUFFICIENT CONDITIONS FOR LTI SYSTEMS
... Then one can verify that [y(n)]i = [y(n)]M for all n and hence y(n) is not rich. But the input x(n) is rich. This contradicts the assumption that H(z) is RP. So the coefficient rank of H(z) can only be unity or M . ¤ 4.5. Completion of Proof of Necessity Now we are ready to prove conditions (a) and ...
... Then one can verify that [y(n)]i = [y(n)]M for all n and hence y(n) is not rich. But the input x(n) is rich. This contradicts the assumption that H(z) is RP. So the coefficient rank of H(z) can only be unity or M . ¤ 4.5. Completion of Proof of Necessity Now we are ready to prove conditions (a) and ...


V.4 Metrizability of topological vector spaces V.5 Minkowski
... (a) The set A ⊂ X is bounded if and only if each continuous seminorm p on X is bounded on A. (It is enough to test this condition for a family of seminorms generating the topology of X.) (b) Let Y be a LCS and let L : X → Y be a linear mapping. Then L is continuous if and only if ∀q a continuous sem ...
... (a) The set A ⊂ X is bounded if and only if each continuous seminorm p on X is bounded on A. (It is enough to test this condition for a family of seminorms generating the topology of X.) (b) Let Y be a LCS and let L : X → Y be a linear mapping. Then L is continuous if and only if ∀q a continuous sem ...

LECTURE NOTES CHAPTER 2 File
... • Scalar: parameter possessing magnitude but not direction. Examples: mass, volume, temperature ...
... • Scalar: parameter possessing magnitude but not direction. Examples: mass, volume, temperature ...

adobe pdf - people.bath.ac.uk
... (b) Suppose that G is finite of order pn where n ≥ 1, Use part (a) to show that |Z(G)| ≡ 0 mod p and deduce that |Z(G)| > 1. 2. Let G be a group of order p2 where p is a prime number. (a) Show that if G is non-abelian, we must have |Z(G)| = p and g p = 1 for every g ∈ G. (b) Suppose that G is non-ab ...
... (b) Suppose that G is finite of order pn where n ≥ 1, Use part (a) to show that |Z(G)| ≡ 0 mod p and deduce that |Z(G)| > 1. 2. Let G be a group of order p2 where p is a prime number. (a) Show that if G is non-abelian, we must have |Z(G)| = p and g p = 1 for every g ∈ G. (b) Suppose that G is non-ab ...

ON SYSTEMS OF DIFFERENTIAL EQUATIONS IN THE SPACE OF
... where w is a vector field on T with hyperbolic singular points. It is easy to see that this field is glued from linear hyperbolic fields. It will be proven in Theorem 10, that the operator L with the vector field (2) on the cylinder is normally solvable. Although the considered examples confirm our ...
... where w is a vector field on T with hyperbolic singular points. It is easy to see that this field is glued from linear hyperbolic fields. It will be proven in Theorem 10, that the operator L with the vector field (2) on the cylinder is normally solvable. Although the considered examples confirm our ...


Schauder bases and the bounded approximation property in
... (b) Let F be a separable Banach space with the bounded approximation property, and let V be a pseudoconvex open subset of F . Let (yp ) be a sequence of distinct points of V such that dV (yp ) → 0. Then there exists g ∈ Hwu (C(V )) such that |g(yp )| → ∞ and g(yp ) 6= g(yq ) whenever p 6= q. Proof. ...
... (b) Let F be a separable Banach space with the bounded approximation property, and let V be a pseudoconvex open subset of F . Let (yp ) be a sequence of distinct points of V such that dV (yp ) → 0. Then there exists g ∈ Hwu (C(V )) such that |g(yp )| → ∞ and g(yp ) 6= g(yq ) whenever p 6= q. Proof. ...


LINEAR EQUATIONS WITH UNKNOWNS FROM A
... Now let p > 4 and assume Lemma 2 to be true for all pairs (h, s) with h > 2, s > 2 and h + s < p. We apply Lemma 1 above. Clearly, S̃ is contained in the set R dealt with in Lemma 1, and therefore, S̃ is the union of finitely many sets S̃ ∩ R0 where R0 is a class as in (2.3). So we have to show that ...
... Now let p > 4 and assume Lemma 2 to be true for all pairs (h, s) with h > 2, s > 2 and h + s < p. We apply Lemma 1 above. Clearly, S̃ is contained in the set R dealt with in Lemma 1, and therefore, S̃ is the union of finitely many sets S̃ ∩ R0 where R0 is a class as in (2.3). So we have to show that ...


A note on closedness of algebraic sum of sets
... and it is easy to observe that for v ∈ C we have ||v|| = a. (Sufficiency.) Assume that every closed and convex set has an element with minimal norm. Let f : X → R be a continuous linear functional with ||f || = 1. Then the set A = {x ∈ X : f (x) > 1} is closed and convex therefore by assumption it h ...
... and it is easy to observe that for v ∈ C we have ||v|| = a. (Sufficiency.) Assume that every closed and convex set has an element with minimal norm. Let f : X → R be a continuous linear functional with ||f || = 1. Then the set A = {x ∈ X : f (x) > 1} is closed and convex therefore by assumption it h ...


GLn(R) AS A LIE GROUP Contents 1. Matrix Groups over R, C, and
... n-dimensional space. The following proposition elaborates on this notion. Proposition 1.4. Let A ∈ GLn (R) and let hx, yi = x1 y1 + . . . + xn yn be the Euclidean inner product. The following are equivalent: (1) AAT = I (that is, A ∈ O(n, R)). (2) For entries aij , aji , aij aji = δij . (3) The colu ...
... n-dimensional space. The following proposition elaborates on this notion. Proposition 1.4. Let A ∈ GLn (R) and let hx, yi = x1 y1 + . . . + xn yn be the Euclidean inner product. The following are equivalent: (1) AAT = I (that is, A ∈ O(n, R)). (2) For entries aij , aji , aij aji = δij . (3) The colu ...
![Math 110B HW §5.3 – Solutions 3. Show that [−a, b] is the additive](http://s1.studyres.com/store/data/017359919_1-72a70245febeadd05992d7dba1b6dd48-300x300.png)
Math 110B HW §5.3 – Solutions 3. Show that [−a, b] is the additive
... 9. Let W be the ring defined by the set of all ordered pairs (x, y) of integers x and y. Equality, addition and mulitplication are defined as follows: (x, y) = (z, w) ↔ x = z and y = w in Z (x, y) + (z, w) = (x + z, y + w) (x, y) · (z, w) = (xz − yw, xw + yz) Let R be the set of all matrices of the ...
... 9. Let W be the ring defined by the set of all ordered pairs (x, y) of integers x and y. Equality, addition and mulitplication are defined as follows: (x, y) = (z, w) ↔ x = z and y = w in Z (x, y) + (z, w) = (x + z, y + w) (x, y) · (z, w) = (xz − yw, xw + yz) Let R be the set of all matrices of the ...
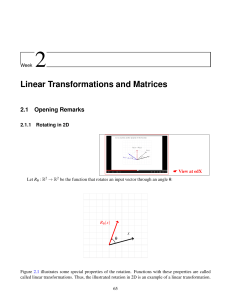
Linear Transformations and Matrices
... • Find scalar λ and vector x such that f (x) = λx (only if m = n). For general vector functions, the last two problems are often especially difficult to solve. As we will see in this course, these problems become a lot easier for a special class of functions called linear transformations. For those ...
... • Find scalar λ and vector x such that f (x) = λx (only if m = n). For general vector functions, the last two problems are often especially difficult to solve. As we will see in this course, these problems become a lot easier for a special class of functions called linear transformations. For those ...

Basis (linear algebra)

Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.