




Precalculus - Catalina Foothills School District
... Functions: Linear, Quadratic, and Exponential Models (F-LE) HS.F-LE.2 Construct linear and exponential functions, including arithmetic and geometric sequences, given a graph, a description of a relationship, or two input-output pairs (include reading these from a table). HS.F-LE.3 Observe using grap ...
... Functions: Linear, Quadratic, and Exponential Models (F-LE) HS.F-LE.2 Construct linear and exponential functions, including arithmetic and geometric sequences, given a graph, a description of a relationship, or two input-output pairs (include reading these from a table). HS.F-LE.3 Observe using grap ...

ON CUBIC RINGS AND QUATERNION RINGS In this paper, we
... In both the cubic and quaternion case, the ring A is Gorenstein over R (in the sense that the A-module Hom(A, R) is locally free of rank 1) if and only if the cubic or quadratic form is primitive (in the sense that the ideal generated by its coefficients is equal to R). For cubic rings, see [GGS, §5 ...
... In both the cubic and quaternion case, the ring A is Gorenstein over R (in the sense that the A-module Hom(A, R) is locally free of rank 1) if and only if the cubic or quadratic form is primitive (in the sense that the ideal generated by its coefficients is equal to R). For cubic rings, see [GGS, §5 ...

Linear Algebra and TI 89
... APPS 6:DATA/MATRIX Editor provides the format for editing matrix. To edit a new matrix, simply enter APPS 6 3 and then select 2:matrix for Type. In the box for variable, type in a name for your matrix. The next two boxes are to be filled with the dimension of the matrix. Note that you should use the ...
... APPS 6:DATA/MATRIX Editor provides the format for editing matrix. To edit a new matrix, simply enter APPS 6 3 and then select 2:matrix for Type. In the box for variable, type in a name for your matrix. The next two boxes are to be filled with the dimension of the matrix. Note that you should use the ...

Let [R denote the set of real numbers and C the set of complex
... In the previous subsection we saw that the characteristic polynomial of an n x n involves a polynomial of degree n that can be factorized as the product of different linear and quadratic terms (see Theorem 2.10). Furthermore, it is not possible to factorize any of these quadratic terms as the produc ...
... In the previous subsection we saw that the characteristic polynomial of an n x n involves a polynomial of degree n that can be factorized as the product of different linear and quadratic terms (see Theorem 2.10). Furthermore, it is not possible to factorize any of these quadratic terms as the produc ...

Math 396. Bijectivity vs. isomorphism 1. Motivation Let f : X → Y be a
... − sin(θ0 )∂x |f (ξ0 ) + cos(θ0 )∂y |f (ξ0 ) , ∂z |f (ξ0 ) ∈ Tf (ξ0 ) (R3 ) that are clearly linearly independent. Hence, f is an immersion, so f is an immersion too (as f factors through f ). But both S 1 × R and C have dimension 2 at all points, so for dimension reasons the tangent maps of f are li ...
... − sin(θ0 )∂x |f (ξ0 ) + cos(θ0 )∂y |f (ξ0 ) , ∂z |f (ξ0 ) ∈ Tf (ξ0 ) (R3 ) that are clearly linearly independent. Hence, f is an immersion, so f is an immersion too (as f factors through f ). But both S 1 × R and C have dimension 2 at all points, so for dimension reasons the tangent maps of f are li ...


THE UNIVERSAL MINIMAL SPACE FOR GROUPS OF
... ([GW02]). Following Pestov’s work Uspenskij has shown in [Usp00] that the action of a topological group G on its universal minimal system M (G) (with card M (G) ≥ 3) is never 3-transitive so that, e.g., for manifolds X of dimension > 1 as well as for X = Q, the Hilbert cube, and X = K, the Cantor se ...
... ([GW02]). Following Pestov’s work Uspenskij has shown in [Usp00] that the action of a topological group G on its universal minimal system M (G) (with card M (G) ≥ 3) is never 3-transitive so that, e.g., for manifolds X of dimension > 1 as well as for X = Q, the Hilbert cube, and X = K, the Cantor se ...

3 Lie Groups
... expanding the exponential map to linear order. Why should we only be interested in linearorder terms? Recall that when we developed the exponential map, we thought of exp(A) as a large product of infinitesimal translations, [1 + ϵA]N. If we enforce the subgroup conditions on A for a single infinites ...
... expanding the exponential map to linear order. Why should we only be interested in linearorder terms? Recall that when we developed the exponential map, we thought of exp(A) as a large product of infinitesimal translations, [1 + ϵA]N. If we enforce the subgroup conditions on A for a single infinites ...

Week 4
... Definition 9.3. A space X is said to be Hausdor↵ (also called T2 ) if, given any two points x and y in X, there are disjoint open sets U and V with x 2 U and y 2 V . This is a somewhat mild “separation property” that is held by many spaces in practice and that also has a number of nice consequences. ...
... Definition 9.3. A space X is said to be Hausdor↵ (also called T2 ) if, given any two points x and y in X, there are disjoint open sets U and V with x 2 U and y 2 V . This is a somewhat mild “separation property” that is held by many spaces in practice and that also has a number of nice consequences. ...


1 Chapter 2: Rigid Body Motions and Homogeneous Transforms
... 3. Rotating vectors in the same coordinate frame ...
... 3. Rotating vectors in the same coordinate frame ...



Bounded Linear Operators on a Hilbert Space
... ϕn (f ) = √ 2π T that maps a function to its nth Fourier coefficient is a bounded linear functional. We have kϕn k = 1 for every n ∈ Z. One of the fundamental facts about Hilbert spaces is that all bounded linear functionals are of the form (8.5). Theorem 8.12 (Riesz representation) If ϕ is a bounde ...
... ϕn (f ) = √ 2π T that maps a function to its nth Fourier coefficient is a bounded linear functional. We have kϕn k = 1 for every n ∈ Z. One of the fundamental facts about Hilbert spaces is that all bounded linear functionals are of the form (8.5). Theorem 8.12 (Riesz representation) If ϕ is a bounde ...



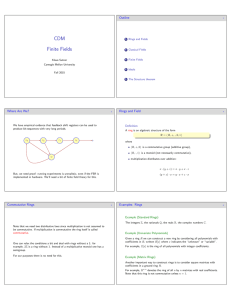
Introduction to Coding Theory
... Then S is a subfield of F since S contains 0; a, b ∈ S implies (ab)q = aq bq = ab, so ab ∈ S; and, for a, b ∈ S and b 6= 0 we have (ab−1 )q = aq b−q = ab−1 , so ab−1 ∈ S. On the other hand, xq − x must split in S since S contains all its roots, i.e its splitting field F is a subfield of S. Thus F = ...
... Then S is a subfield of F since S contains 0; a, b ∈ S implies (ab)q = aq bq = ab, so ab ∈ S; and, for a, b ∈ S and b 6= 0 we have (ab−1 )q = aq b−q = ab−1 , so ab−1 ∈ S. On the other hand, xq − x must split in S since S contains all its roots, i.e its splitting field F is a subfield of S. Thus F = ...

1 Groups
... Clearly this is the same as that of Z2 , using the relabelling 0 7→ e, 1 7→ g. Exercise Show that any group containing exactly three elements is isomorphic to Z3 . ...
... Clearly this is the same as that of Z2 , using the relabelling 0 7→ e, 1 7→ g. Exercise Show that any group containing exactly three elements is isomorphic to Z3 . ...

An independent axiom system for the real numbers
... is some real number ra such that f a (x) = ra x. If a = 0, then from what was shown above, we can take ra = 0. Suppose now that a > 0. Since ◦ satisfies (D) and (O4), it is easy to see that f a is an increasing homomorphism on R. The existence of ra now follows from Lemma 2. In case a < 0, the exist ...
... is some real number ra such that f a (x) = ra x. If a = 0, then from what was shown above, we can take ra = 0. Suppose now that a > 0. Since ◦ satisfies (D) and (O4), it is easy to see that f a is an increasing homomorphism on R. The existence of ra now follows from Lemma 2. In case a < 0, the exist ...

Basis (linear algebra)

Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.