

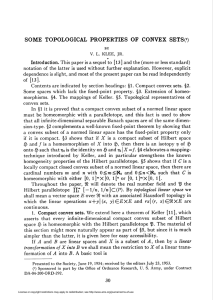

What is perfect competition? - IDEALS @ Illinois
... Various notions of measurability are discussed in Himmelberg [1957]. In the case where the measure space ...
... Various notions of measurability are discussed in Himmelberg [1957]. In the case where the measure space ...



Here is a pdf version of this page
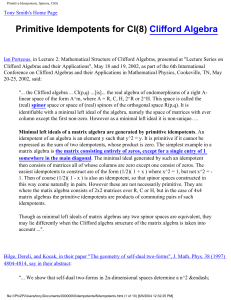
... with respect to computational systems, perhaps doing things like forming loops that might let the computational system to "adjust itself" and/or "teach itself"? Robert de Marrais commented on some of those questions, saying in part: "... I'm finding two directions to go with box-kites next, and yes, ...
... with respect to computational systems, perhaps doing things like forming loops that might let the computational system to "adjust itself" and/or "teach itself"? Robert de Marrais commented on some of those questions, saying in part: "... I'm finding two directions to go with box-kites next, and yes, ...




Solutions to Assignment 8
... has a solution for all possible constants on the right sides of the equations. Is it possible to find two nonzero solutions of the associated homogeneous system that are not multiples of each other? Discuss. Again, we know that rank(A) + dim(Nul(A)) = 10. If the system is consistent for all possible ...
... has a solution for all possible constants on the right sides of the equations. Is it possible to find two nonzero solutions of the associated homogeneous system that are not multiples of each other? Discuss. Again, we know that rank(A) + dim(Nul(A)) = 10. If the system is consistent for all possible ...


Characterization of 2-inner Product by Strictly Convex 2
... b are linearly dependent ; ii) ( x, y | z ) = ( y , x | z ) , for every x, y , z ∈ L , iii) ( x, x | y ) = ( y , y | x ) , for every x, y ∈ L ; iv) (α x, y | z ) = α ( x, y | z ) , for every x, y , z ∈ L. and for every α ∈ R ; and v) ( x + x1, y | z ) = ( x, y | z ) + ( x1, y | z ) , for every x1, x ...
... b are linearly dependent ; ii) ( x, y | z ) = ( y , x | z ) , for every x, y , z ∈ L , iii) ( x, x | y ) = ( y , y | x ) , for every x, y ∈ L ; iv) (α x, y | z ) = α ( x, y | z ) , for every x, y , z ∈ L. and for every α ∈ R ; and v) ( x + x1, y | z ) = ( x, y | z ) + ( x1, y | z ) , for every x1, x ...



On the q-exponential of matrix q-Lie algebras
... It goes without saying that all computations in this paper apply to the so-called q-real numbers from [3], which are also defined in the paper. The corresponding umbral calculus, with definitions of the alphabet, which would take too long to reproduce here, can also be found in [3]. The q-natural nu ...
... It goes without saying that all computations in this paper apply to the so-called q-real numbers from [3], which are also defined in the paper. The corresponding umbral calculus, with definitions of the alphabet, which would take too long to reproduce here, can also be found in [3]. The q-natural nu ...


MVE165/MMG630, Applied Optimization Lecture 3 The simplex
... General derivation of the simplex method (Ch. 4.8) B = set of basic variables, N = set of non-basic variables ⇒ |B| = m and |N| = n − m ◮ Partition matrix/vectors: A = (B, N), x = (xB , xN ), c = (cB , cN ) ◮ The matrix B (N) contains the columns of A corresponding to the index set B (N) — Analogou ...
... General derivation of the simplex method (Ch. 4.8) B = set of basic variables, N = set of non-basic variables ⇒ |B| = m and |N| = n − m ◮ Partition matrix/vectors: A = (B, N), x = (xB , xN ), c = (cB , cN ) ◮ The matrix B (N) contains the columns of A corresponding to the index set B (N) — Analogou ...

STRATIFICATION BY THE LOCAL HILBERT
... the strata where the invariant is maximal. In Hironaka’s work this invariant is the Hilbert-Samuel function. Thus it needs the determination of the strata of maximality of the local Hilbert-Samuel function. However, to our knowledge, there does not exist an algorithm for this step that works in any ...
... the strata where the invariant is maximal. In Hironaka’s work this invariant is the Hilbert-Samuel function. Thus it needs the determination of the strata of maximality of the local Hilbert-Samuel function. However, to our knowledge, there does not exist an algorithm for this step that works in any ...


Eulerian Derivation of the Coriolis Force
... The above derivation can be called as a Lagrangian approach since it exploits the concept of the fluid parcel. This Lagrangian derivation seems to be a standard style not only in the field of geophysical fluid dynamics, but also in more general fluid dynamics [e.g., 1, p.140]. The conventional Lagra ...
... The above derivation can be called as a Lagrangian approach since it exploits the concept of the fluid parcel. This Lagrangian derivation seems to be a standard style not only in the field of geophysical fluid dynamics, but also in more general fluid dynamics [e.g., 1, p.140]. The conventional Lagra ...



What is a linear relationship (straight line)? A linear relationship
... This is the least common way to represent a straight line. The word intercept here refers to both the x-intercept (a,0) and the y-intercept (0,b) of the straight line. This is the best way to represent a straight line if you want the readers to obtain two intercepts at the same time. To see b is the ...
... This is the least common way to represent a straight line. The word intercept here refers to both the x-intercept (a,0) and the y-intercept (0,b) of the straight line. This is the best way to represent a straight line if you want the readers to obtain two intercepts at the same time. To see b is the ...
Basis (linear algebra)

Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.