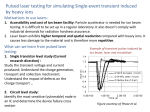
Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Buck converter wikipedia , lookup
Audio power wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Mains electricity wikipedia , lookup
Power engineering wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Alternating current wikipedia , lookup
Opto-isolator wikipedia , lookup
TIME OF FLIGHT IMAGING TIME OF FLIGHT IMAGING Differences between Beamwidth and Pulsewidth/ Range Gate Imaging Beamwidth Limited Imaging Push Broom Airborne Laser Scanners Collision Avoidance Laser Scanners 3D Pan/Tilt and Pan/Prism Laser Scanner 3D Mirror Millimetre Wave Radar Scanner Pulsed Time of Flight Laser Analysis 1 Measurement Modes Beamwidth Limited Range Gate Limited Each range gate generates a unique pixel in the radar image Good for complex surfaces Resolution limited to the beamwidth spot size Slow process Good for narrow beam lasers Restricted to flat areas Cross-range resolution determined by beam width Range resolution determined by the gate size Fast process Good for wide beam radars Beamwidth Limited Imaging 2 Range Gate Limited Imaging Laser Radar Performance Analysis 3 Power Density on the Target The power density at the target assuming an isotropic radiator SI = Modified by the collimating effect of the lens used to direct the beam. It is the ratio of the beam angle in steradians to that of the full sphere 4π P 2 4πR 2 (π 4 )θ BW Power Density Back at the Receiver The area of the beam footprint on the target assuming that the target is larger than the beam SR = The backscatter coefficient dependent on the target material etc. The reflected power is scattered equally over the forward hemisphere of 2π steradians 4π P π (Rθ BW )2 ρ 1 2 2 2 4πR (π 4 )θ BW 4 2πR Note: If the target is a retro reflector then ρ can be much larger than 1 to compensate for the assumption that the target scatters equally over 2π steradians 4 Received Power The received power that is intercepted by a lens with area A The optical efficiency of the laser chain from the front aperture of the lens π P 4π 1 2 ( ) R θ ρ Aτ o BW 2 4 4πR 2 (π 4 )θ BW 2πR 2 S= Simplifies to S= PAτ o ρ πR 2 Target Smaller than the Beam In the unlikely event that the laser beam is wider than the target diameter, then the target terms should be substituted by the laser radar cross section σ S= 2 PAστ o 2 π 2 R 4θ BW For optical systems the 1/e = 0.367 power level is used to define the beamwidth which equates to the following θ BW 1.05λ λ = ≈ D D θ BW = 2 λ2 D2 = λ2π 4A 5 Range Equation for Small Targets Substituting for the beamwidth θBW the received power is given by the following formula 8PA 2στ o S= 3 4 2 π R λ W Laser Receivers Direct detection laser receivers convert the received laser echo directly into a voltage or current using a PIN diode or avalanche photodiode Heterodyne receivers downconvert the received signal using a stable laser local oscillator Low frequency signals can then be amplified and filtered to enhance detection probability 6 Photovoltaic Detectors Photovoltaic effect consists of the generation of a potential difference as a consequence of the absorption of radiation The primary effect is photo-ionisation, or the production of hole-electron pairs that can migrate to a region where charge separation can occur. This charge separation usually occurs at a potential barrier between two layers of solid material. These can include semiconductor PN junctions and metal-semiconductor interfaces For a material with a conversion efficiency η, the average current (amps) produced by a light beam with optical power, P is as follows i= ηeP hf A Silicon As the output current is proportional to the input power, this is a square law detector Photodiode Types PIN Photodiode P-Intrinsic (lightly doped)-N structure Depleted region made as large as possible to minimise recombination Responsivity 0.5 to 1 A/W Avalanche Photodiode PIN Photodiode Electrons and holes released by absorbed photons accelerate and strike neutral atoms freeing more “secondary” carriers Responsivity 0.5 to 100 A/W Need high voltage (up to 300V for Si) and are temperature sensitive More complex circuitry, and less reliable than PINs Avalanche Photodiode 7 Photodiode Characteristics Can be configured as a current-to-voltage converter where the relationship between P and ip tracks the current axis (V=0) (red line) Alternatively the diode produces a voltage across its terminals when operated into a high resistance (green line) io refers to the dark current which flows in the absence of any light and is attributed to thermal generation of hole-electron pairs Operating Ranges of Some IR Detectors and Transmission Characteristics of the Atmosphere 8 Noise Level of a Direct Detection Receiver The receiver noise level for a direct detection laser radar can be related to the specific detectivity of the detector D* using the following formula ( Ad Δf )1 / 2 N= D* W where: N – Noise level (W) Ad – Detector area (cm2) Δf – Receiver bandwidth (Hz) D* - Detectivity (cm-Hz1/2W-1) (see Fig 3.7 for D*) This is often listed in the specifications for photodiodes as the dark current and is typically of the order of 1nA Noise Level of an Heterodyne Receiver The noise spectral density of an ideal receiver comprising both thermal and photon noise is given by the following ψ(f ) = hf e hf / kT −1 + hf where: Ψ(f) – Spectral density (W/Hz) h – Plank’s Constant 6.6256x10-34 (Ws2 ) f – Frequency (Hz) k – Boltzmann Constant 1.38x10-23 (Ws/K) T – Absolute Temperature (K) 9 Noise Power Spectral Density μ ( f ) = hf γ ( f ) = kT Noise Power Spectral Density For microwave radars, the noise power density is determined by the thermal noise floor γ(f) = kT In the infrared, the noise power density is determined primarily by the photon noise μ(f) = hf The noise level of an heterodyne receiver can therefore be written as N= hfB η where: N – Noise level (W) η - Quantum efficiency (0.3 to 0.5) (how many photons are required to produce one photo-electron) B – Receiver bandwidth (Hz) 10 Cross section of Glint Targets Glint targets represent returns from corner reflectors or normal surfaces (such as the ground) where there is a single dominant scatterer Returns are generally fairly constant from pulse to pulse The laser radar cross section for a square corner reflector is given by the following formula 4πD 4 σ = 3λ2 Where: σ - Cross section (m2) D – Side of the reflector (m) Signal to Noise Ratio Pd and Pfa 11 Example An earth bound CO2 laser operating at a wavelength of 10.6μm radiates through a collimating lens with a diameter of 500mm. If it produces 500W pulses with a duration of 0.1s What would the diameter of the footprint be on the moon Ignoring atmospheric effects what would the power density on the moon be in W/m2 A retro-reflector with a diameter of 10cm and a reflectivity of 0.99 reflects some of the power back to earth. What is the received power density Is the reflected power density from the moons surface back on the earth (backscatter ρ = 0.2 ) larger or smaller than that returned by the retro-reflector If an heterodyne receiver uses the same size lens, what is the single pulse signal to noise ratio that we could expect Example (continued) The diameter of the footprint on the moon The mean distance to the moon is 384400km The 1/e beamwidth is θ BW = 1.05 × λ 1.05 ×10.6 ×10−6 = = 22.3μrad D 0.5 So the diameter will be d = RθBW = 3.844x108x22.3x10-6 = 8556m The power density of the signal on the moon Afoot = πd2/4 = 57.5x106 m2 SI = P/Afoot = 500/57.5x106 = 8.7μW/m2 12 Example (continued) The power density back on the earth from the retro reflector The effective cross section of the retro-reflector is σ = 0.99 4πD 4 4π × 0.14 = 0 . 99 3λ2 3 × 10.6 × 10 − 6 ( ) 2 = 3.7 × 10 6 m 2 = 65.7 dBm 2 So the power density back on earth is found by applying the range equation SR = 2 Pσ 2 × 500 × 3.7 × 106 = 2 4 π 2 R 4θ BW π 2 × 3.844 × 108 22.3 × 10− 6 ( )( ) 2 = 3.45 × 10 −17 W / m 2 Example (continued) The power density back on earth from the signal reflected from the surface of the moon SR = Pρ 500 × 0.2 = 2 πR π 3.844 × 108 ( ) 2 = 2.15 × 10 −16 W / m 2 Which is 10x higher than that obtained from the retro reflector 13 Example (continued) What is the signal to noise ratio The matched filter bandwidth β = 1/τ = 10Hz The noise floor is determined by photon noise and a detector with a quantum efficiency of 0.5 N= hfβ η = hcβ ηλ = 6.625 × 10 −34 × 3 × 108 × 10 = 3.75 × 10 −19 W −6 0.5 × 10.6 × 10 For an optical efficiency of 100%, the received signal power is the product of the power density and the lens aperture S = SRπd2/4 = 2.15x10-16x0.196 = 4.21x10-17 W So the SNR is S/N = 112 (20.5dB) Fine Range Measurement Coarse time is measured using a digital clock which is stopped when the echo pulse exceeds a fixed threshold Samples of the direct pulse and the delayed pulse voltages are made at the following clock leading edge A delay line discriminator determines the pulse position with respect to this leading edge The clock count and the discriminator output are added to determine the true range Accurate to a fraction of the pulse length Received Pulse Vthresh Clock Last count N Stop counting Enable S&H Vdir Vdel Delayed pulse Direct pulse Sample and Hold Vdir - Vdel ΔR = -------------Vdir + Vdel Range = K x Count(N) + J x ΔR + Offset 14 Push Broom Scanners Rotating prism scans the laser beam at right angles to the direction of travel Between 2000 and 8000 laser pulses are generated every second Because the ground is rough, some power is reflected back to the receiver By registering the forward motion of the aircraft using GPS/INS and the beam angle, a 2D raster is produced Range and /or reflected signal amplitude are logged to produce an image of the ground Scanner Unit Operational Principle Surface Models A digital image is a rectangular array of cells where each cell contains a single value Topological images are produced when height information is stored Reflectivity images are produced when echo amplitude is stored Though the points measured usually have a non-linear spacing, the cells in the image are generally placed at the vertices of a regular grid to facilitate processing 15 Digital Model Definitions Digital Elevation Model (DEM): A continuous mathematical representation describing the shape of the surface of the earth as a function of latitude and longitude Digital Surface Model (DSM): Defines the air/surface interface it includes trees, buildings etc. Digital Terrain Model (DTM): Reflects the pure terrain information as it is represented on contour maps. Usually produced by filtering the raw DSM data as shown Digital Landscapes Digital surface models with additional information like colour and texture that produce a more realistic (or effective) representation Both DEM’s and DSM’s are considered to be 2½ D representations as they contain only a single elevation value, whereas in reality each point may contain a multitude of surfaces Tree canopy Building roof Ground 16 Image Analysis The fine structure of the pulse echo yields information about the vertical structure of the surface Roughness Height and shape of manmade objects Tree canopy height Tree canopy density Reflectivity properties can be analysed to produce images similar to those available from infrared cameras (albeit with lower resolution) Most DTMs are made in conjunction with high resolution passive multi-spectral images that rely on external sources of lighting Transformed Topological Image 17 Intensity, Hugh Saturation (IHS) Image Elevation determines the colour (hue) Reflectivity determines the brightness (intensity) Building Topology Individual buildings can be resolved to an accuracy of between 0.5 and 2m Can resolve Individual building footprints Building height Roof shape 18 Flood Simulation Tides, Dikes and Flooding 19 Sea Bottom Profiling Laser Airborne Depth Sounder (LADS Mk II) Laser altimeter measures aircraft height GPS/INS measures aircraft position Blue-green laser firing 900 pulses/s measures the water depth to 70m Sounding density 2m x 2m Position accuracy <5m CEP 95% Swathe width 240m Coverage 64 sq km/hr Direct link to NOAA satellite allow the system to avoid areas of turbidity Light Penetration Through Water 20 LADS Sea-Bottom Profile LADS Aircraft over Sydney Sow and Pigs Reef and the Western Channel 2D Laser Scanners for Collision Avoidance and Navigation Laser Scanner Laser Scan While Driving 21 3D Scanners Pan/Prism Scanner Pan/Tilt Scanner Imaging Hue encoded helicopter image 22 CAD-CAM Rapid Prototyping CAM Model Original Volume Estimation Combine to form a point cloud image Target Scan the target from different positions Resample onto a uniform grid and calculate the volume 23 Reverse Engineering Millimetre Wave Radar Mirror Scanner Laser performance is degraded in bad weather or in dust and smoke An alternative is to use millimetre wave radar even though the angular resolution is lower Radar has the advantage of illuminating multiple targets within the beam simultaneously Increases update rate Foliage penetration and evaluation Typical specifications Range resolution 25cm Beamwidth 1° Scan rate >1Hz 24 Image Comparison 3D Perspective Movie 25 Pulsewidth Limited Imaging Includes 2D Ultrasound Imaging and Radar Imaging This method will be dealt with in detail in the chapters on Phased Arrays and Synthetic Aperture Radar 26 Acoustic Microscopy The Scanning Acoustic Microscope (SAM) produces images by scanning a focussed beam of acoustic energy (sound) across a sample to measure its elastic properties Magnification Low Medium High Acoustic image of the interior of a plastic potted IC Tracking insect Swarms 27 The Problem To understand the behaviour of swarms of insects is a crucial step in the process of minimising the devastation caused by these pests during their relentless advance across the land. Previous attempts to track individual insects have been both expensive and time consuming as they involved tagging individuals with small wireless beacons and then pinpointing their position periodically using radio location devices and GPS. The Solution Design an alternative, less manpower intensive and more effective method of tracking both individual, and groups of insects as follows: A number of insects are captured and each tagged with a small patch of an efficient retro-reflective material. A laser based push-broom scanner is developed to pinpoint the range and scan angle In conjunction with a helicopter or fixed-wing aircraft fitted with a GPS/INS, pinpoint the positions of the tagged locusts. Helicopter with push-broom scanner Detail of Locust with Retroreflector Locust Swarm 28 Laser Specifications Scanner Requirements Operational height Swathe width h = 1000m x = >1000m Laser Specifications Wavelength Average power Pulsewidth PRF Beam divergence Tx Aperture Rx Aperture Pp = λ = 905nm +/-5nm (near infrared) Pave = 2mW (eye safe?) τ = 20ns fp = 10kHz θb = 2mrad dtx = 50mm diameter drx = 50mm diameter 2 × 10-3 Pave = = 10W τ . f p 20 × 10-9 × 104 System Block Diagram A faceted mirror rotates at high speed and scans the laser beam across the ground. Reflections from the retroreflectors on the locusts and returns from the ground are detected by the receiver and digitised. A processor determines the position of each retroreflector from the measured range and angle of the beam in conjunction with the instantaneous position and attitude of the aircraft as measured by the GPS and Inertial Measurement Unit (IMU). The data can be stored on an onboard hard drive (HD) or communicated the the ground through a wireless modem. 29 Maximum Angular Scan Rate The angle subtended by a swathe width of x = 1000m from a height of h = 1000m is 500 x/2 = 2 tan −1 = 53° 1000 h θ s = 2 tan −1 Angle doubling suggests a 12 faceted mirror with 30° between facets to generate a 60° scan swathe width Need 50% overlap to ensure coverage. Hence, the beam should scan 1mrad (half the beam divergence) between pulses. The maximum angular scan rate is therefore determined by the following θ& = θb 2 fp = 2 × 10-3 × 10000 = 10 rad/s 2 The beam scans through 60° (1.05 rad) in 1.05/10 = 0.105s Maximum Allowable Forward Velocity At a height of h = 1000m, the diameter of the footprint on the ground is xf = θbh = 2m. Therefore to provide for the same 50% overlap that was achieved for the cross-range scan, the aircraft can advance by xf /2 = 1m in 0.105s, which equates to a forward velocity of 9.5m/s 1 N+1 2 n r Sca Mirro 60deg Aircraft Motion N Beam Footprint 30 Footprint Area The maximum operational range required of the laser is at an offset angle of 30°. For h = 1000m, this corresponds to 1000 = 1155m cos 30 rmax = The spot size on the ground is will be slightly elliptical with a minor axis diameter of d min = rmaxθ b = 1155 × 2 × 10 -3 = 2.31m and a major axis diameter of rmaxθb 1155 × 2 × 10-3 = = 2.66m cos 30 0.866 d maj = Making the total area of the footprint Af = πd min d maj 4 = 4.86m2 Laser Power Density on the Ground The power density of the beam on the ground at the maximum operational range is just the peak power divided by the footprint area Si = Pp Af = 10 = 2.06 W/m 2 4.86 31 Power Density of Retro Reflected Signals Back at the Receiver The total reflected power is the product of the incident power density, Si and the patch area, Apat. Assuming that the reflected light is scattered uniformly over the hemisphere, the power density back at the camera is given by S r = Si Apat . 1 2πR 2 Because the patch is retroreflective, when it is illuminated, the simplest model is to assume that it becomes an antenna that is diffraction limited by its aperture. The gain of such an antenna is just the ratio of the power radiated in a specific direction relative to the isotropic. The power density back at the laser receiver will be Retroreflective patch 5x5mm S r = Si Apat . 1 G pat 2πR 2 Relationship Between Gain and Aperture The relationship between the aperture, Apat, and the gain, Gpat, of a diffraction limited antenna is G pat ≈ 4πApat λ2 32 Calculating the Retro Reflected Power Density at the Receiver Substituting for the gain 2 4πApat S r = Si λ 2 For a square retroreflective patch with dpat = 5mm, the formula becomes 4 4πd pat S r = Si λ 2 1 2πR 2 The optical cross section, σ, is defined as the ratio by which the power density at the receiver exceeds that of an isotropic scatterer. Therefore 4 −3 4 σ= 1 2πR 2 4πd pat λ 2 = ( 4π × 5 × 10 (905 × 10 ) ) −9 2 = 9526m 2 Making the equation S rr = Siσ 1 1 = 2.06 × 9526 × = 2.34 × 10- 3 W/m 2 2 2πR 2π × 11552 Calculating the Backscattered Power Density at the Receiver The physical cross section of the footprint on the ground is Af = 4.86m2 and the backscatter coefficient ρ = 0.1 (see Table 3.1) which makes the backscattered power density at the receiver S rg = Si A f ρ . 1 1 = 2.06 × 4.86 × 0.1 × = 1.19 × 10 − 7 W/m 2 2 2πR 2π × 11552 33 Signal to Noise Ratio due to Laser Backscatter from the Ground The ratio of the power density at the receiver due to the retroreflector and that of the ground backscatter SNR = 10 log10 2.34 × 10 −3 S rr = 10log10 = 42.9dB 1.19 × 10 − 7 S rg This in more than adequate to ensure that the correct signal is detected Noise from the Sun Over the full band from 300nm to 2500nm, the total power density is obtained by determining the integral under the curve. This is approximately 1000W/m2. 34 Effect of Optical Filter The specified wavelength for a typical laser range finder is stated as 905+/-5nm. Hence an optical filter with a bandwidth of 10nm would be sufficient. Such filters can be acquired from a number of optics suppliers, and have the following specifications Full width half max (FWHM) λb = 10+/-2nm Efficiency τo = 0.7 For an incident flux of 0.6Wm-2nm-1 at λ = 905nm, the total power density will be Sis = 0.6λb = 6W/m 2 So the total power density back at the laser receiver is, once again, determined by the area of the footprint on the ground, the backscatter coefficient and the assumption of uniform scattering. S rs = Sis A f ρ . 1 1 = 6 × 4.86 × 0.1 × = 3.47 × 10 − 7 W/m 2 2 2 2πR 2π × 1155 Signal to Noise Ratio due to backscatter from the Sun The ratio of the power density at the receiver due to the retroreflector and that of the ground backscatter from the sun SNR = 10 log10 S rr 2.34 × 10−3 = 10log10 = 38.2dB S rs 3.47 × 10− 7 This is slightly lower than the SNR from the laser backscatter and so will define the SNR at the receiver 35 Power into the Receiver The total power received is equal to the product of the power density at the receiver, Srr, the receive lens aperture, Alens, and the optical efficiency, τo. Assume that the lens diameter is 50mm, which makes Alens = 1.96×10-3 m2 Srr =2.34×10-3 W/m2 was determined earlier τo = 0.7 from the specifications of the optical filter Prec = S rr Alensτ o = 2.34 × 10 -3 × 1.96 × 10 −3 × 0.7 = 3.21 × 10 -6 W Optics Micro Controller Detection Digital Signal Processor Diode Laser Photo Diode Receiver Optical Filter PIN Photodiode Characteristics 36 Photodiode Output Note that the peak sensitivity (Responsivity) occurs at around 900nm and is R = 0.53A/W. The maximum output current will therefore be I rec = Prec R = 3.21 × 10-6 × 0.53 = 1.7 × 10-6 A The signal to noise ratio is determined from the ratio of the received current to Irec to the dark current Id SNR = 20 log10 I rec 1.7 × 10−6 = 20log10 = 64.6dB Io 10− 9 Current to Voltage Converter Because it is more convenient to work with voltage, the output current passes through an op-amp based current to voltage converter before passing through a filter matched to the laser pulse width. The feedback resistor, R, is selected to produce a reasonable output voltage. For example, by selecting R = 1MΩ, a peak voltage of 1.7V would be produced for an input current pulse of 1.7μA V+ Photodiode R i + Bandpass Filter Vo = iR 37 Matched Filter Effects The transmitted pulsewidth is τ = 20ns, so the receiver bandwidth, β, will be the reciprocal of that to a first approximation β= 1 τ = 1 = 50MHz 20 × 10− 9 An appropriately fast op amp would be required to drive the filter with this short pulse Assuming that the dark current comprises white noise which is uniformly distributed over the 200MHz bandwidth of the photodiode, then by placing a matched filter with a bandwidth of 50MHz at the output, the SNR is improved by the ratio of the total bandwidth to the filter bandwidth 200 = 70.6dB 10 50 SNR = 64.6 + 10 log Effects of Square law Detector on input SNR It can be shown that the effective signal to noise ratio out of a square law detector is also squared, so the SNR of the retroreflector return compared to that from the sun will increase from 38.2dB to 76.4dB 38 Conclusions In this example, it can be seen that the retroreflective return will easily be visible above the returns from the backscattered laser signal, the backscatter from the sun and the dark current. The signal to noise ratio of 64.6dB is limited by the photodiode dark current Helicopter with Strobe & Camera Detail of Locust with Retroreflector Locust Swarm 39