Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
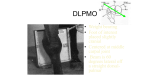
Biomedical Imaging I Class 9 – Ultrasound Imaging Doppler Ultrasonography; Image Reconstruction 11/09/05 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 1 Doppler Effect Change in ultrasound frequency caused by motion of source (which can be a scatterer) and/or receiver relative to the background medium fR θ fR f fR c c v R f c c v f More generally, fR c f c v cos Effect of receiver motion is different from that of source motion (Why?). Combining both effects gives: observer velocity c v cos fd fR f 1 f , Doppler shift c v cos source velocity If v = v’, 2v cos fd f c v cos BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 2 Clinical Application of Doppler Effect 2v cos If v = v’, f d c v cos f see: C. Holcombe et al., “Blood flow in breast cancer and fibroadenoma estimated by colour Doppler ultrasonography,” British J. Surgery 82, 787-788 (1995). But why would it ever be the case that source and detector both are moving in the same direction with the same speed? How about if the medium is moving past a stationary source and detector? Ultrasound transmitter Artery Limb Ultrasound receiver BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 3 Net Doppler Shift Source Receiver c λ f = wave frequency [s-1] λ = wavelength [m] c = wave (or phase, or propagation) velocity [m-s-1] c = λf BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 4 Net Doppler Shift Case 1: source in motion relative to medium and receiver v v = source speed [cm-s-1] T = 1/f = wave period [s] vT = v/f = distance source travels λ´ = λ – v/f between emission of successive wavefronts (crests) [m] = c/f – v/f = (c – v)/f f’ = c/λ´ = [c/(c – v)]f BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 5 Net Doppler Shift Case 2: receiver in motion relative to medium and source v v = receiver speed [m-s-1] c’ = c + v = wave propagation speed in receiver’s frame of reference [m-s-1] λ´ = λ c´ = c + v f’ = c´/λ = [(c + v)/c]f BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 6 Net Doppler Shift Case 3: source and detector in motion relative to each other and medium vs vr f’net = f’sf’r/f = [c/(c – vs)][(c + vr)/c]f = [(c + vr)/(c – vs)]f fd = f’net – f = [(c + vr)/(c – vs) - 1]f BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 7 Nonlinear Features of Ultrasound Wave Propagation Pressure p can be expressed as a function of density η: p ps condensation 0 ,0 0 A 0 ¶p A 0 ¶ 1 B 2 2 0 0 , B 0 s 0 ,0 In combination with the fact that c 2 ¶2 p ¶ 2 s 0 ,0 ¶p , we get ¶ s , 0 B ¶c 20c 0 A ¶p 2 0 s 0 ,0 Note that if B 0, then c is a function of p. Wave crests (regions of compression) propagate faster than wave troughs (regions of rarefaction)! Observable significance of this dependence is...? BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 8 Nonlinear Features of Ultrasound: Shock Waves BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 9 Ultrasound Computed Tomography Recommended supplemental reading: A. J. Devaney, “A filtered backpropagation algorithm for diffraction tomography,” Ultrasonic Imaging 4, 336-350 (1982). J. F. Greenleaf, “Computerized tomography with ultrasound,” Proceedings of the IEEE 71, 330-337 (1983). H. Schomberg, W. Beil, G. C. McKinnon, R. Proksa, and O. Tschendel, “Ultrasound computerized tomography,” Acta Electronica 26, 121-128 (1984). J. Ylitalo, J. Koivukangas, and J. Oksman, “Ultrasonic reflection mode computed tomography through a skullbone,” IEEE Transactions on Biomedical Engineering 37, 1059-1066 (1990). Kak and Slaney, Chapters 6 (Tomographic Imaging with Diffracting Sources) and 8 (Reflection Tomography) BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 10 Ultrasound Computed Tomography Elementary Forms of Ultrasound CT Types Ultrasonic Refractive Index Tomography B • Projection: A 1 n x , y ds VwT d , T d T Tw Ultrasonic Attenuation Tomography B • Projection: A x , y ds • Three methods for estimating attenuation line integral: – Energy-Ratio Method – Division of Transforms Followed by Averaging Method – Frequency-Shift Method All of the foregoing are predicated on an assumption of negligible refraction/diffraction/scattering of ultrasound beams in the medium BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 11 Ultrasound Computed Tomography Kak and Slaney, pp. 153, 154 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 12 Ultrasound Computed Tomography Photograph Ultrasound Refractive Index CT Image Kak and Slaney, p. 154 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 13 Ultrasound Computed Tomography Ultrasonic Attenuation CT Images E-ratio Method Division of Transforms Method f-shift Method Kak and Slaney, pp. 156-158 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 14 Energy-Ratio Method x(t) = incident ultrasound pulse, y(t) = detected transmitted ultrasound pulse, yw(t) = detected pulse for transmission through water FT X(f), Y(f), Yw(f) Transfer function: H(f) = Y(f)/X(f), |H(f)| = |Y(f)/Yw(f)|. E(fk) = energy (or power), at frequency fk, in H(f). Consider any two specific frequencies, f1 and f2, for which E(f1) and E(f2) can be reliably and accurately determined. Then in principle: B A x , y ds E 1 ln 1 2 f 2 f 1 E 2 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 15 Division of Transforms Followed by Averaging Method x(t) = incident ultrasound pulse, y(t) = detected transmitted ultrasound pulse, yw(t) = detected pulse for transmission through water FT X(f), Y(f), Yw(f), Yw(f) Transfer function: H(f) = Y(f)/X(f), |H(f)| = |Y(f)/Yw(f)|. HA(f) = -ln|H(f)| = -ln|Y(f)/Yw(f)|. In principle: B A 1 x , y ds 2f 2 f 2 f 2 f 2 f 2 1 H A f df 2f 1 f1 f1 f 1 f 1 H A f df BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 16 Frequency-Shift Method x(t) = incident ultrasound pulse, y(t) = detected transmitted ultrasound pulse FT X(f), Y(f), Yw(f) f0 = frequency at which Yw(f) is maximal fr = frequency at which Y(f) is maximal σ2 = width of |Yw(f)| In principle: B A x , y ds f0 fr 2 2 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 17 Ultrasound Computed Tomography Ultrasound CT mammography... ...compared with x-ray CT mammograms of the same patient. Kak and Slaney, pp. 159-160 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 18 Diffraction Tomography with Ultrasound What we can (attempt to) do when the “negligible refraction/diffraction/scattering” criterion mentioned earlier is violated Based upon treating ultrasound propagation through medium as a wave phenomenon, not as a particle (i.e., ray) phenomenon For homogeneous media, the Fourier Diffraction Theorem is analogous to the central-slice theorem of x-ray CT Heterogeneous media are treated as (we hope) small perturbations of a homogeneous medium, to which an assumption such as the Born approximation or Rytov approximation can be applied BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 19 Fourier Diffraction Theorem I Arc radius is ultrasound frequency, or wavenumber Kak and Slaney, pp. 219 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 20 Fourier Diffraction Theorem II Arc radius dependence on wavenumber Tomographic measurements fill up Fourier space Kak and Slaney, pp. 228, 229 BMI I FS05 – Class 9 “Ultrasound Imaging” Slide 21