




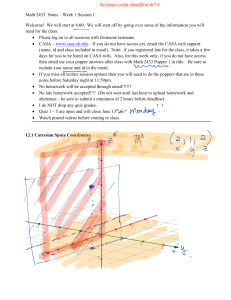
PHYS 101 Lecture 2 - Simon Fraser University
... Although (2) looks like a linear equation in time (whereas the x vs. t is anything but linear), in fact v contains time dependence. Substituting (1) into (2) to show the explicit ...
... Although (2) looks like a linear equation in time (whereas the x vs. t is anything but linear), in fact v contains time dependence. Substituting (1) into (2) to show the explicit ...
10/05/12 - cse.sc.edu
... a is the angle between the two vectors Dot product is always 0 between perpendicular vectors If V and W are unit vectors, the dot product is 1 for parallel vectors pointing in the same direction, -1 for opposite ...
... a is the angle between the two vectors Dot product is always 0 between perpendicular vectors If V and W are unit vectors, the dot product is 1 for parallel vectors pointing in the same direction, -1 for opposite ...


![§1.8 Introduction to Linear Transformations Let A = [a 1 a2 an] be](http://s1.studyres.com/store/data/006151798_1-1596c7f77f21452ed436a495dc65f749-300x300.png)


Terms - XiTCLUB
... rotation of its input vectors. Both the dot product and the cross product are rotationally invariant, while vector addition and scalar multiplication, in general, are not. Scalar - An ordinary number; whereas vectors have direction and magnitude, scalars have only magnitude. The scalars we will be d ...
... rotation of its input vectors. Both the dot product and the cross product are rotationally invariant, while vector addition and scalar multiplication, in general, are not. Scalar - An ordinary number; whereas vectors have direction and magnitude, scalars have only magnitude. The scalars we will be d ...


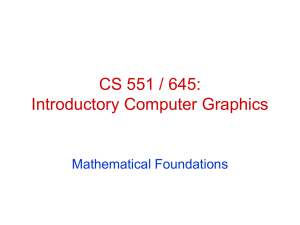
Geometry review, part I Geometry review I
... For computations, vectors can be described as pairs (2D), triples (3D), … of numbers. Coordinate system (2D) = point (origin) + 2 basis vectors. Orthogonal coordinate system: basis vectors perpendicular. Orthonormal coordinate system: basis vectors perpendicular and of unit length. Representation of ...
... For computations, vectors can be described as pairs (2D), triples (3D), … of numbers. Coordinate system (2D) = point (origin) + 2 basis vectors. Orthogonal coordinate system: basis vectors perpendicular. Orthonormal coordinate system: basis vectors perpendicular and of unit length. Representation of ...

3.7.5 Multiplying Vectors and Matrices
... It is important to realize that you can use \dot" for both left- and rightmultiplication of vectors by matrices. Mathematica makes no distinction between \row" and \column" vectors. Dot carries out whatever operation is possible. (In formal terms, a.b contracts the last index of the tensor a with th ...
... It is important to realize that you can use \dot" for both left- and rightmultiplication of vectors by matrices. Mathematica makes no distinction between \row" and \column" vectors. Dot carries out whatever operation is possible. (In formal terms, a.b contracts the last index of the tensor a with th ...



Special Factoring ( )( ) ( ) ( ) ( )( ) ( )( ) Converting Between Degree
... The reference angle for the direction angle of the vector 〈 . Figure out which quadrant this angle should be in and measure the angle counterclockwise from the positive x-axis. The horizontal component of the vector 〈 The vertical component of the vector 〈 ...
... The reference angle for the direction angle of the vector 〈 . Figure out which quadrant this angle should be in and measure the angle counterclockwise from the positive x-axis. The horizontal component of the vector 〈 The vertical component of the vector 〈 ...


Cross product

In mathematics and vector calculus, the cross product or vector product (occasionally directed area product to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R3) and is denoted by the symbol ×. The cross product a × b of two linearly independent vectors a and b is a vector that is perpendicular to both and therefore normal to the plane containing them. It has many applications in mathematics, physics, engineering, and computer programming. It should not be confused with dot product (projection product).If two vectors have the same direction (or have the exact opposite direction from one another, i.e. are not linearly independent) or if either one has zero length, then their cross product is zero. More generally, the magnitude of the product equals the area of a parallelogram with the vectors for sides; in particular, the magnitude of the product of two perpendicular vectors is the product of their lengths. The cross product is anticommutative (i.e. a × b = −b × a) and is distributive over addition (i.e. a × (b + c) = a × b + a × c). The space R3 together with the cross product is an algebra over the real numbers, which is neither commutative nor associative, but is a Lie algebra with the cross product being the Lie bracket.Like the dot product, it depends on the metric of Euclidean space, but unlike the dot product, it also depends on a choice of orientation or ""handedness"". The product can be generalized in various ways; it can be made independent of orientation by changing the result to pseudovector, or in arbitrary dimensions the exterior product of vectors can be used with a bivector or two-form result. Also, using the orientation and metric structure just as for the traditional 3-dimensional cross product, one can in n dimensions take the product of n − 1 vectors to produce a vector perpendicular to all of them. But if the product is limited to non-trivial binary products with vector results, it exists only in three and seven dimensions. If one adds the further requirement that the product be uniquely defined, then only the 3-dimensional cross product qualifies. (See § Generalizations, below, for other dimensions.)