
Galileo, Descartes, and Newton – Founders of the Language of
... corrected Galileo’s notion of inertia.” (Hall 1967, p. 78). Descartes and Newton corrected several of Galileo’s errors and changed the direction which the program of mathematization of nature should take. Though Galileo’s scientific ideas played a fundamental role in the rise of modern science, the ...
... corrected Galileo’s notion of inertia.” (Hall 1967, p. 78). Descartes and Newton corrected several of Galileo’s errors and changed the direction which the program of mathematization of nature should take. Though Galileo’s scientific ideas played a fundamental role in the rise of modern science, the ...

Classical Mechanics and Human Movement
... mathematical language. The laws of motion can be summarized as follows: A body in our universe is subjected to a multitude of forces exerted by other bodies. The forces exchanged between any two bodies are equal in magnitude but opposite in direction. When the forces acting on a body balance each ot ...
... mathematical language. The laws of motion can be summarized as follows: A body in our universe is subjected to a multitude of forces exerted by other bodies. The forces exchanged between any two bodies are equal in magnitude but opposite in direction. When the forces acting on a body balance each ot ...

Newtonian Physics - UFDC Image Array 2
... is built around light and matter: how they behave, how they are ...
... is built around light and matter: how they behave, how they are ...
PHY101 - National Open University of Nigeria
... point is called the ORIGIN, O. At this point, which is the origin, we draw three mutually perpendicular axes to represent the X, Y and Z axes respectively. So the initial position of the object or the final position of the object can be designed with reference to this fixed frame work X, Y and Z axe ...
... point is called the ORIGIN, O. At this point, which is the origin, we draw three mutually perpendicular axes to represent the X, Y and Z axes respectively. So the initial position of the object or the final position of the object can be designed with reference to this fixed frame work X, Y and Z axe ...

Reading materials
... Let’s turn now from thinking about speeds to thinking about velocities. Consider a wheel v rolling without slipping with a constant translational velocity v across a level surface. For each point below, determine the point’s net velocity by combining, as vectors, the point’s translational velocity ( ...
... Let’s turn now from thinking about speeds to thinking about velocities. Consider a wheel v rolling without slipping with a constant translational velocity v across a level surface. For each point below, determine the point’s net velocity by combining, as vectors, the point’s translational velocity ( ...

Classical Mechanics: a Critical Introduction
... x(t) = (9/4)t4 + c where c is any constant (the proof is simply to calculate dx/dt and verify that we obtain the desired v(t)). The appearance of the arbitrary constant c in x(t) is not surprising, since knowledge of the velocity at all times is not quite sufficient to fully determine the position a ...
... x(t) = (9/4)t4 + c where c is any constant (the proof is simply to calculate dx/dt and verify that we obtain the desired v(t)). The appearance of the arbitrary constant c in x(t) is not surprising, since knowledge of the velocity at all times is not quite sufficient to fully determine the position a ...
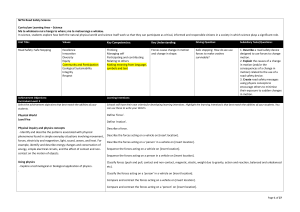
241.0 KB - NZTA Education Portal
... 1. Change the slope of the plank. Use stacking blocks or books to change the starting height of the trolley car. Make a prediction about any change in the trolley car’s motion before testing. Repeat your experiment three times, taking the average result under each condition as the speed or distance ...
... 1. Change the slope of the plank. Use stacking blocks or books to change the starting height of the trolley car. Make a prediction about any change in the trolley car’s motion before testing. Repeat your experiment three times, taking the average result under each condition as the speed or distance ...
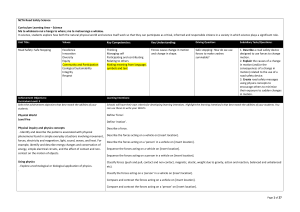
249.1 KB - NZTA Education Portal
... travelled. Make a prediction about any change in the trolley car’s motion before testing. Repeat your experiment up to three times, taking the average result under each condition as the speed or distance travelled. Compare this result with the prediction. 3. Change the frictional forces between the ...
... travelled. Make a prediction about any change in the trolley car’s motion before testing. Repeat your experiment up to three times, taking the average result under each condition as the speed or distance travelled. Compare this result with the prediction. 3. Change the frictional forces between the ...
- D-Scholarship@Pitt
... complex than a mere translation. Euler did not begin with Newton’s laws and derive analytic results from those. Rather, he re-conceived the entire science from top to bottom, taking the occupation of space to be the essential feature of bodies from which the rest of mechanics could be derived neces ...
... complex than a mere translation. Euler did not begin with Newton’s laws and derive analytic results from those. Rather, he re-conceived the entire science from top to bottom, taking the occupation of space to be the essential feature of bodies from which the rest of mechanics could be derived neces ...

9.5. Particular motions of a rigid body
... In this chapter we shall deal with the study of the motion of the non deformable bodies, namely of the rigid bodies. We have seen in the previously chapters that in the study of the motion we have to answer to two questions (which will remain the same for the bodies) namely: which is the position of ...
... In this chapter we shall deal with the study of the motion of the non deformable bodies, namely of the rigid bodies. We have seen in the previously chapters that in the study of the motion we have to answer to two questions (which will remain the same for the bodies) namely: which is the position of ...

Classical Mechanics: a Critical Introduction
... x(t) = (9/4)t4 + c where c is any constant (the proof is simply to calculate dx/dt and verify that we obtain the desired v(t)). The appearance of the arbitrary constant c in x(t) is not surprising, since knowledge of the velocity at all times is not quite sufficient to fully determine the position a ...
... x(t) = (9/4)t4 + c where c is any constant (the proof is simply to calculate dx/dt and verify that we obtain the desired v(t)). The appearance of the arbitrary constant c in x(t) is not surprising, since knowledge of the velocity at all times is not quite sufficient to fully determine the position a ...



paper pattern - Target Publications
... To develop better understanding of concepts; we have discussed relevant points and questions in the form of Additional Information. Any additional information about a concept is provided in the form of Note. We had developed the concept of Brain Teasers, which are theory questions and numericals bui ...
... To develop better understanding of concepts; we have discussed relevant points and questions in the form of Additional Information. Any additional information about a concept is provided in the form of Note. We had developed the concept of Brain Teasers, which are theory questions and numericals bui ...
Ch 08) Rotational Motion
... Since v is the same for all points of a rotating object, Eq. 8–3 tells us that a also will be the same for all points. Thus, v and a are properties of the rotating object as a whole. With v measured in radians per second and t in seconds, a has units of radians per second squared Arad兾s2 B. Each poi ...
... Since v is the same for all points of a rotating object, Eq. 8–3 tells us that a also will be the same for all points. Thus, v and a are properties of the rotating object as a whole. With v measured in radians per second and t in seconds, a has units of radians per second squared Arad兾s2 B. Each poi ...

Lecture Notes on Classical Mechanics for Physics 106ab Sunil
... Thornton, and Goldstein, but cover the material in a different order than any one of these texts and deviate from them widely in some places and less so in others. The reader will no doubt ask the question I asked myself many times while writing these notes: why bother? There are a large number of m ...
... Thornton, and Goldstein, but cover the material in a different order than any one of these texts and deviate from them widely in some places and less so in others. The reader will no doubt ask the question I asked myself many times while writing these notes: why bother? There are a large number of m ...