Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Sensor Node Lifetime: An Experimental Study
Hoang Anh Nguyen, Anna Förster, Daniele Puccinelli, Silvia Giordano
Networking Laboratory
University of Applied Sciences of Southern Switzerland
CH-6928 Manno, Switzerland
{hoang.nguyen, anna.foerster, daniele.puccinelli, silvia.giordano}@supsi.ch
Abstract—Node lifetime is a key performance metric in wireless sensor network (WSN) research. Simplistic assumptions
and naı̈ve lifetime estimation techniques invariably prove to be
extremely unreliable in practice, to the point that premature
battery depletion notoriously affects real-world deployments.
In this paper we adopt an experimental approach and employ
various types of real-world batteries to determine the actual
lifespan of a sensor node under common operating conditions.
We present a rich set of results from an extensive experimental
campaign based on the widely used TelosB platform running
TinyOS. We have measured the actual node lifetime using
various brands of commercial batteries as a function of
different combinations of application parameters. Some of our
observations match previously published results that are often
neglected, while others underscore less known properties of
low-power radios.
Keywords-wireless sensor networks, lifetime, experiments,
TinyOS, TelosB
I. I NTRODUCTION
The lifetime of a sensor node begins when it first boots
and ends when it is no longer able to communicate or
perform its other basic tasks. Network lifetime can be
defined in many different ways [1], but it ultimately depends
on the lifetime of the individual nodes. While everyone in the
sensor network community agrees that sensor node lifetime
is a key metric, preliminary studies both in simulation and
on real hardware use calculations based on datasheet for
the expected network lifetime. Such predictions are usually
based on basic assumptions about duty cycle and power
consumption of sleep/receive/transmit states of the onboard
radio and fail to take into account the non-linear behavior of
the batteries, their large performance spread, or the power
consumption of processing, flash writing, sensing, etc. For
example, the energy cost of writing to Flash on sensor
nodes like the popular TelosB platform is often ignored or
considered as less significant than the energy cost of a radio
operation.
In this paper we present the results of an experimental
study of the lifetime of real nodes with various application
parameters. We focus on duty-cycled radio operation and
Flash usage across different battery brands. Specifically, we
focus on high duty-cycles. Our data provides a deep insight
into the battery consumption of real world sensor nodes and
batteries. For example, we measured that power consumption
of flash writing might be comparable to radio transmission in
some application scenarios and that different battery brands
can affect the total node lifetime as much as 25%.
The paper continues with a description of related efforts
in Section II. Section III explains our experimental methodology, and Section IV presents our experimental results.
II. R ELATED WORK
The extension of battery lifetime is an omnipresent theme
in sensor network research and permeates all levels of
protocol design. Indeed, premature battery depletion notoriously affects real-world deployments [2], which are designed
with the goal of long-time untethered operation. In spite
of its importance, it is typically estimated by extrapolating
from energy consumption measurements or datasheet figures. While it is not uncommon for sensor network lifetime
studies to assume a linear battery discharge, the presence of
non-linearities was already underscored a decade ago in [3],
where it is shown that the discharge rate, the duty-cycling,
and the DC-to-DC converter affect the usable battery capacity. While the DC-to-DC converter disappeared from
later sensing node hardware, the other factors pinpointed
in [3] continued and will continue to affect the behavior
of sensing nodes. The impact of various parameters on
battery performance was studied experimentally in [4] using
a testbed of MICA2DOT motes using measurements on real
batteries along with other techniques. The focus of [4] is
the impact of the electrochemical phenomena of batteries
on sensor network design parameters; it is shown that the
rate capacity effect (a stronger discharge current reduces the
battery capacity), the charge recovery effect (if the battery
is occasionally allowed to idle, its capacity increases), and
thermal affects (operating at higher temperatures increases
the battery capacity but reduces the battery cycle life) all
have non-trivial implications on higher-level decisions, such
as power control and adaptive sampling. The importance
of a realistic battery model that accounts for non-linearities
and its impact on simulation have also been studied in
[5]. Recently, the non-linear phenomena that occur inside
batteries have been the subject of two notable studies. In
[6], the battery recovery effect is investigated in detail, while
[7] adapts a pre-existing model for the estimation of the
remaining battery lifetime of a node battery that accounts
for both the recovery and the rate capacity effect so that it
can be implemented on a low-end mote-class device.
Despite the overriding importance of battery lifetime,
there are only a few experimental sensor network studies
that employ real batteries and report discharge curves [8] [9].
One of the reasons for the lack of experimental data obtained
using real batteries is the relatively long time it takes to
drain them. A novel hardware measurement methodology
based on using special capacitors with a very high capacity,
the so-called Goldcaps, was developed in [10]: a Goldcap is
charged and the time a node can live off of it is measured,
so that the energy consumption of sensor network protocols
can be realistically evaluated within a few hours. Because
it enables deterministic repeatable experiments, this method
was also employed by some later studies such as [11] and
[12]; it is certainly very valuable, but it abstracts away
from the real-life phenomena underscored in [3] and [4],
which seriously affect real-world deployments where nodes
do run on real-world batteries. At the same time, over
the past few years, experimental sensor network research
has leveraged the existence of hugely helpful remote-access
testbeds such as Harvard’s MoteLab [13] and TU Berlin’s
TWIST [14], where nodes are purposefully wall-powered.
Working on such testbeds allows researchers to isolate out
the effect of batteries, but also forces them to estimate
node lifetime based on techniques such as online software
energy estimation [15], which on one hand give a reasonable
ballpark estimate, but on the other hand abstract away from
the non-linearities of real-batteries.
The focus of the present study is indeed to determine the
extent to which the vagaries of real-world batteries affect
the operation of common sensing node hardware as well as
the common assumptions and expectations on the behavior
of batteries.
III. E XPERIMENTAL M ETHODOLOGY
We completed a rich set of experiments using moteclass hardware powered by commercial off-the-shelf AA
batteries. The main goal of our study is to identify the
impact of typical WSN application scenarios on the battery
lifetime. Generally speaking, our methodology consists of
programming sensor nodes with an application and letting
them operate until their energy reserve is depleted. During its
lifetime, each node logs data on its on-board flash memory,
which can be retrieved and parsed after the completion of
each experiment.
We use TelosB motes programmed using TinyOS1 . The
nominal power consumption data of TelosB nodes is provided in Table I and was taken from the TelosB data sheet
and the CC2420 data sheet. The transmission power in our
experiments is set to 0 dBm, the maximum setting of the
CC2420 radio.
1 www.tinyos.net
Component
Module
RF Transceiver
Mode
Current draw
Active
Sleep
Receive
Transmit (at 0 dBm)
Sleep
1.8 mA
5.1 µA
19.7 mA
17.4 mA
0.01 mA
Data from www.memsic.com and www.ti.com
Table I
N OMINAL POWER CONSUMPTION OF T ELOS B NODES .
The general application scenario is depicted in Figure 3.
It is based on the most widely used WSN application, where
the node gathers environmental data at regular intervals and
transmits them to a base station, sleeping between any two
data gatherings (duty-cycled data collection). In our case,
we have 4 parameters that control the exact behavior of the
node. D represents the duty cycle of the node, S is the
number of packets the node sends to the base station at every
cycle, while R is the number of packets it receives from the
base station during every cycle. Finally, C is the frequency
of logging data on the on-board flash memory, meaning that
the node logs data every C-th cycle. By controlling these
parameters we are able to capture the impact of all radio
modi (sleeping, receiving and transmitting), as well as the
impact of using the on-board flash memory. We conducted
a total of 6 different experiments, whose parameters are
summarized in Table II.
Additionally, we have used various brands of AA batteries
in order to capture the impact of nominal capacity of different battery models. The batteries we have used are listed
in Table III with their nominal and measured capacities.
The measured capacities are taken from an online battery
capacity survey2 . Each of the experiments in Table II is
conducted with various brands of batteries (using three nodes
for each brand). All batteries are new and unused, but no
details about their history are known (e.g. how long they
have been stored in the shop).
IV. E XPERIMENTAL R ESULTS
Our experiments serve to underscore many interesting
properties of real sensor nodes, some of which defy common
expectations. In this section we will begin with the less
surprising results, obtained in the absence of communication,
and then move on to examine the results obtained with active
radio communication. The reported node lifetime is the time
between the power-up and the last logging (in the absence
of communication) or the reception of the last packet (with
active radio communication). We refer to nodes that operate
in the absence of communication as silent nodes, and to the
2 http://www.laurinieminen.com
S.1
S.2
S.3
S.4
C.1
C.3
Parameters
D [%]
S
R
duty cycle sent
received
Silent experiments
100
0
0
75
0
0
75
0
0
25
0
0
Communication experiments
75
1
50
75
50
1
Node lifetime with 100 % duty cycle over initial capacity of batteries
100
C
log
95
1
1
30
1
Lifetime [h]
Experiment
Energizer Ultra+
90
Panasonic Extreme Power
85
80
75
30
30
Panasonic Industrial
70
2500
2600
Table II
E XPERIMENTAL PARAMETER SETTINGS FOR OUR STUDY
Node lifetime over duty cycle
(100-D)% from full cycle
180
time
160
Lifetime [h]
switch off
radio
140
Energizer Ultra+
Ansmann
Varta High Energy
120
5000 msec
send 0 .. S packets
to base station
receive 0 .. R packets
from base station
Figure 1.
3000
200
beginning
of next cycle
beginning
of cycle
switch on
radio
2700
2800
2900
Nominal capacity of batteries, [mAh]
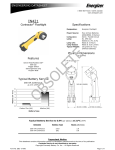
Figure 2. Node lifetime measured for different values of the nominal
battery capacity for various alkaline battery brands.
every C-th cycle,
write 8 bytes to flash log
D% from full cycle
Varta High Energy
Ansmann
100
80
100
75
Duty cycle in percent (100% == no sleep)
25
One cycle of the sensor node lifetime.
Figure 3.
node.
experiments that run in the absence of communication as
silent experiments.
A. Battery properties and brands
Observation 1. There is a significant difference in node
lifetime depending on the battery brand and nominal capacity (up to 25% in our experiments).
The use of five different alkaline battery brands (listed in
Table III) enables us to study the impact of different battery
brands as well as different values of nominal capacity on the
Brand name
Capacity [mAh]
Measured Measured
at 15Ω*
at 3Ω*
Energizer Ultra+
2950
2439
1624
Panasonic Industrial
2200
2166
1264
Panasonic Extreme Power n/a
2559
1444
Varta High Energy
2850
2545
1682
Ansmann Alkaline
2400
n/a
n/a
*Data taken from http://www.laurinieminen.com
Nominal
Table III
P ROPERTIES OF BATTERIES , AS USED IN OUR LIFETIME STUDY. A LL
BATTERIES ARE OF TYPE AA (LR6)
Node lifetime at different values of the duty cycle of a silent
lifetime and reliability of a sensor node. Figure 2 presents
the total lifetime of the nodes with 100% duty cycle (no
sleep, radio is always on, no communication) for different
values of the nominal capacity of the batteries.
As can be seen in Figure 2, the relationship between the nominal capacity of the battery and the lifetime of the node is roughly linear. Further information
about measuring capacity of batteries can be found at
http://www.laurinieminen.com.
Figure 2 clearly shows that the choice of the battery is
crucial. Many brands of batteries are sold without clear identification of their nominal capacity or with vague statements
such as ”high capacity”. WSN practitioners need to be aware
of the fact that the choice of the battery can increase (or
decrease) the lifetime of their deployments by as much as
25%, according to our results and could be even much more
in other scenarios.
B. Radio Duty-cycling
Observation 2. Lower duty cycles of the radio can increase significantly the node lifetime. However, the increase
is not linear and is up to 250% lower than expected.
As common sense dictates, radio duty-cycling can sig-
Comparison between real world and theoretical lifetime
500
real world
datasheet expected
alwaysïon projected
Lifetime [h]
400
300
200
100
25
Figure 4.
75
Duty cycle [%]
100
Comparison of node lifetime: measured against projected.
Impact of flash and radio on node lifetime
Flash seldom, RX
450
Lifetime [h]
400
350
300
250
Flash seldom, no comm
200
150
S.2
Figure 5.
lifetime.
Flash seldom, TX
Flash often, no comm
S.3
C.1
C.2
The impact of radio communication on the total sensor node
nificantly reduce the energy consumption and can therefore
increase a node’s lifetime, but not as significantly as one
would expect. Figure 3 presents the results of our silent
experiments as a function of the duty cycle of the radio.
Figure 4, on the other hand, compares the real world
experimental values with the expected values. The datasheet
expected curve represents a calculation of the expected node
lifetime on the basis of the power consumption data from
Table I. The always-on projected curve, on the other hand,
uses the data of our always-on experiment as a baseline to
project the network lifetime in the presence of radio dutycycling (assuming a linear lifetime increase).
A thorough understanding of the reasons for the significant discrepancy between the measured values and the
expected ones is beyond the scope of this paper, but we do
wish to underscore how large the discrepancy is.
C. On-board flash memory
Observation 3. Flash memory energy consumption is very
high and may be comparable to the power consumption of
the radio.
Our results point out that the energy consumption of
the on-board flash memory (logging) is significant on the
TelosB hardware platform and might exceed the energy
consumption of the radio, depending on the exact application
scenario. The reason for this is the used NOR flash memory
on the TelosB nodes, which consumes more power than other
technologies, e.g. NAND. Details about power consumption
of flash memories are given in [16].
Figure 5 compares the achieved values of node lifetime
in the presence of flash and radio usage. The data is given
as [mean, min, max] values across all the battery brands
that we employed. As shown in Table II, S.2 and S.3
are silent experiments with 75% duty cycle, and the only
difference between them lies in the frequency of write-toflash operations.
Indeed, writing to the flash memory rarely instead of
every cycle is able to prolong the network lifetime as much
as 300%. Compare this result to experiment C.2 (same
Figure 5). Surprisingly, it is more power efficient to use
the flash only sparingly and send out 50 data packets per
cycle than to use the flash every cycle and not send out
any packets. Consequently, our experimental evidence shows
that the radio is not the only significant energy-consumer
on board and that the power consumption of the flash
might be comparable to that of the radio. However, other
researchers come to different conclusions with the same
hardware platform [17]. We plan to investigate the reasons
for these differences in the future.
D. Radio communication
Observation 4. Even if radio transmission uses less power
than radio reception, it uses up more energy.
Although we have just showed that it is not completely
true that the radio is the component with the largest impact
on the overall energy consumption of a sensor node, the
radio does of course have a significant impact on the total
node lifetime, as can be seen in Figure 5. Recall that
experiments C.1 and C.2 have both 75% duty cycle and
log data on the flash memory every 30th cycle. The only
difference between them is that C.1 focuses on receiving
packets and C.2 on transmitting packets. Since the power
consumption of radio transmission is lower, we are expecting
the C.2 experiments to obtain longer lifetimes, which is
obviously not the case. As shown in Figure 6(e) of [18],
with the CC2420, the current draw of radio transmission is
lower than the one of radio reception, but the overall energy
consumption of transmission is higher.
E. Half-dead sensor nodes
Observation 5. Towards the end of their lifetime, nodes
are still able to transmit data to others, but are not able to
receive anything. The duration of this half-dead status may
account for as 27 % of the total lifetime.
We have just noted that radio transmission has a lower
current draw than radio reception, but a higher energy
consumption. An interesting implication is that, towards the
end of the battery lifetime, a node may still be able to
transmit, but may not be able to receive. This behavior is
Base station data (wall powered)
120
0.9
ï40
110
ï50
0.6
0.5
0.4
0.3
90
80
ï60
ï70
70
0.2
ï80
60
0.1
120
RSSI [dBm]
100
0.7
LQI [50ï110]
Delivery rate [%]
0.8
135
150
165
180
195
Hours from experiment start
50
120
210
135
150
165
180
195
Hours from experiment start
ï90
120
210
135
150
165
180
195
Hours from experiment start
210
135
150
165
180
195
Hours from experiment start
210
Node data (battery powered)
1
120
0.9
110
0.5
0.4
0.3
RSSI [dBm]
0.6
90
80
ï60
ï70
70
0.2
ï80
60
0.1
Figure 6.
ï50
100
0.7
LQI [50ï110]
Delivery rate [%]
0.8
0
120
ï40
135
150
165
180
195
Hours from experiment start
210
50
120
135
150
165
180
195
Hours from experiment start
210
ï90
120
Delivery rate, RSSI and LQI values of packets at the wall-powered base station (top set) and the battery-powered node (bottom set).
clearly seen in Figure 6, where the reception of packets
by the battery-powered node and by the wall-powered base
station is depicted in terms of delivery rate, Received Signal
Strength Indicator (RSSI), and Link Quality Indicator (LQI)
values. The node (the lower set of graphs) is able to send
and receive data packets for approximately 156 hours, after
that the base station continues receiving packets from the
node for a total of 199 hours.
F. RSSI and LQI
Observation 6. The RSSI and the LQI levels become
unstable shortly before the depletion of a node’s energy
reserve.
Figure 6 shows also the RSSI and LQI values of the sensor
node, as provided by the CC2420 radio interface in TinyOS.
The RSSI and LQI values of the packets received at the
wall-powered base station from the battery-powered node
are relatively stable throughout the lifetime of the node but
degrade significantly towards its death. We conjecture that
this is due to the degradation of the transmit power of the
node induced by battery depletion. Although it is reasonable
to expect some sort of degradation, we did not expect its
extent to be so significant.
V. C ONCLUSION AND F UTURE W ORK
Our rich set of experimental results obtained with TelosB
motes powered by AA batteries has enabled us to point out
several observations, which we can summarize as follows.
1) WSN practitioners should exercise caution in the
choice of their batteries, especially at deployment
time. Our results indicate that batteries with a higher
nominal capacity do result in a significantly longer
lifetime.
2) It is well-known that duty-cycling is essential for
saving energy, but its effects are significantly less
dramatic than what one would expect, and its benefits
wane as the duty-cycled is lowered. Our future work
will focus on experiments at very low duty-cycle to
further investigate this observation.
3) Beware of overusing the flash: it does cost more than
the radio in energy terms, as shown by this study, but
often neglected.
4) Packet reception costs more than transmission instantaneously (e.g., in terms of power), but not over time
(e.g., in terms of energy), as also shown in [18] and
clearly demonstrated in this paper.
5) There exists an end-of-life stage in which it is easier
for nodes to transmit than it is to receive.
6) In the end-of-life stage, the transmit power does not
remain stable.
There are important implications for experimental research.
For instance, inferring conclusions on lifetime estimates
based on wall-powered testbeds should be done with caution.
Moreover, the choice of the batteries at deployment time
should be taken seriously. Furthermore, the flash memory
should not be overused, and its energy footprint should be
kept in mind. There is also a series of implications that are
of interest to simulation-based studies. Our data and our
set of observations clearly indicates that a realistic battery
model is an essential ingredient of a successful simulation.
The battery model and the radio model should not be treated
as separate modules, and their mutual interaction should be
considered. Moreover, a realistic simulation should also account for the peculiar end-of-life stage that we demonstrated
in our experiments.
Our immediate future plans include extending the presented experimental study with other types of batteries
(lithium, zinc-carbon) and with other application parameters,
such as very low duty cycles.
R EFERENCES
[1] I. Dietrich and F. Dressler, “On the Lifetime of Wireless
Sensor Networks,” ACM Transactions on Sensor Networks
(TOSN), vol. 5, no. 1, pp. 1–39, February 2009.
[2] R. Szewczyk, J. Polastre, A. Mainwaring, and D. Culler,
“Lessons from a Sensor Network Expedition,” in The 1st European Workshop on Wireless Sensor Networks (EWSN’04),
Berlin, Germany, Jan. 2004.
[3] S. Park, A. Savvides, and M. Srivastava, “Battery Capacity
Measurement and Analysis using Lithium Coin Cell Battery,”
in International Symposium on Low Power Electronics and
Design (ISLPED’01), Huntington Beach, CA, USA, Aug
2001.
[4] C. Park, K. Lahiri, and A. Ranghunathan, “Battery Discharge
Characteristics of Wireless Sensor Nodes: An Experimental
Analysis,” in The 2nd Annual IEEE Communications Society
Conference on Sensor and Ad Hoc Communications and
Networks (SECON’05), Santa Clara, CA, USA, Sep. 2005.
[5] M. Spohn, S. Sausen, F. Salvadori, and M. Campos, “Simulation of blind flooding over wireless sensor networks based
on a realistic battery model,” apr. 2008.
[6] C. Chau, F. Qin, M. Wasab, and Y. Yang, “Harnessing Battery
Recovery Effect in Wireless Sensor Networks: Experiments
and Analysis,” IEEE Journal on Selected Areas in Communications, vol. 28, September 2010.
[7] J. Rahm, N. Fourty, K. A. Agha, and A. van der Bossche,
“A Recursive Battery Model for Nodes Lifetime Estimation
in Wireless Sensor Networks,” in IEEE Wireless Communications and Networking Conference (WCNC’10), Sydney,
Australia, Apr 2010.
[8] M. Haenggi and D. Puccinelli, “Routing in Ad Hoc Networks:
A Case for Long Hops,” IEEE Communications Magazine,
vol. 43, pp. 93–101, October 2005.
[9] K. Szlavecz, A. Terzis, S. Ozer, R. Musaloiu-E., J. Cogan,
S. Small, R. Burns, J. Grey, and A. Szalay, “Life Under
Your Feet: An End-to-End Soil Ecology Sensor Network,”
Microsoft Technical Report, Tech. Rep. MSR-TR-2006-90,
2006.
[10] H. Ritter, J. Schiller, T. Voigt, A. Dunkels, and J. Alonso,
“Experimental evaluation of lifetime bounds for wireless
sensor networks,” in The 2nd European Workshop on Wireless
Sensor Networks (EWSN’05), Istanbul, Turkey, Feb. 2005.
[11] T. Staub, T. Bernoulli, M. Anwander, M. Waelchli, and
T. Braun, “Lifetime Evaluation for MAC Protocols on Real
Sensor Hardware,” in The 2nd Workshop on Real-World
Wireless Sensor Networks (REALWSN’06), Uppsala, Sweden,
Jun. 2006.
[12] P. Hurni and T. Braun, “Calibrating Wireless Sensor Network
Simulation Models with Real-World Experiments,” in The 8th
International Conferences on Networking (Networking 2009),
Aachen, Germany, May 2009.
[13] G. Werner-Allen, P. Swieskowski, and M. Welsh, “MoteLab:
a Wireless Sensor Network Testbed,” in 4th International
Symposium on Information Processing in Sensor Networks
(IPSN’05), Los Angeles, CA, Apr. 2005.
[14] V. Handziski, A. Koepke, A. Willig, and A. Wolisz, “TWIST:
A Scalable and Reconfigurable Testbed for Wireless Indoor
Experiments with Sensor Networks,” in 2nd International
Workshop on Multi-hop Ad Hoc Networks: from Theory to
Reality (REALMAN’06), Florence, Italy, 2006.
[15] A. Dunkels, F. Osterlind, N. Tsiftes, and Z. He, “Softwarebased on-line energy estimation for sensor nodes,” in Proceedings of the Fourth Workshop on Embedded Networked
Sensors (Emnets IV), Cork, Ireland, Jun. 2007.
[16] G. Mathur, P. Desnoyers, D. Ganesan, and P. Shenoy, “Ultralow power data storage for sensor networks,” in Proceedings
of 5th International Conference on Information Processing in
Sensor Networks (IPSN), Nashville, TN, USA, 2006, pp. 374
–381.
[17] T. O’Donovan, N. Tsiftes, Z. He, T. Voigt, and C. J. Sreenan,
“Detailed diagnosis of performance anomalies in sensornets,”
in Proceedings of the 6th ACM Workshop on Hot Topics in
Embedded Networked Sensors (HotEMNETS), Cork, Ireland,
2010.
[18] J. W. Hui and D. E. Culler, “Ip is dead, long live ip for
wireless sensor networks,” in Proceedings of the 6th ACM
conference on Embedded network sensor systems (SenSys),
Raleigh, NC, USA, 2008, pp. 15–28.