Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
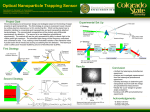
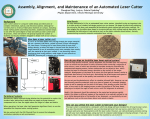
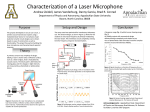
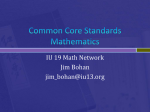
- COO CALTECH OPTICAL OBSERVATORIES CALIFORNIA INSTITUTE OF TECHNOLOGY Caltech Instrumentation Note #636 PALM-3000 High-Order Wavefront Sensor Alignment Guide C. Baranec Rev 1.0 10/28/09 Caltech Optical Observatories California Institute of Technology Pasadena, CA 91125 Abstract This document describes the step-by-step alignment procedure for the high-order wavefront sensor for PALM-3000 as well as other supporting information. Revision Sheet Release No. Rev. 0.1 Rev. 0.2 Rev. 0.3 Rev. 1.0 Date Revision Description 07/18/09 07/19/09 10/15/09 10/28/09 Initial draft of outline by C. Baranec. Finished up to 4.3.1 with 4.3.2 partially finished. Modifications and extensions during October alignment. Major alignment revisions and additions. Procedure leading to the October 18, 2009 alignment of the HOWFS is fully documented. 2 Table of Contents 1 Introduction.............................................................................................................................4 1.1 Acronyms and Definitions......................................................................................................... 4 1.2 Purpose ....................................................................................................................................... 4 1.3 Scope ........................................................................................................................................... 4 1.4 Related Documents .................................................................................................................... 4 1.5 Optical Design Summary .......................................................................................................... 4 1.5.1 1.5.2 2 3 Telescope Simulator ................................................................................................................5 2.1 Overview..................................................................................................................................... 5 2.2 Alignment ................................................................................................................................... 6 LabVIEW Alignment Tool ......................................................................................................8 3.1 Overview..................................................................................................................................... 8 3.2 Procedure for starting ............................................................................................................... 8 3.3 Explanation and use of the tool ................................................................................................ 9 3.3.1 3.3.2 3.3.3 4 Camera and image controls .................................................................................................................... 9 Camera display .................................................................................................................................... 10 Analysis display ................................................................................................................................... 10 HOWFS .................................................................................................................................10 4.1 Optical Design .......................................................................................................................... 10 4.2 Mechanical setup ..................................................................................................................... 12 4.3 Optical alignment .................................................................................................................... 12 4.3.1 4.3.2 4.3.3 4.3.4 4.4 5 Basic System Parameters ....................................................................................................................... 4 Design and component functions ........................................................................................................... 5 Definition of focal point and optical axis ............................................................................................. 12 Alignment of collimating and fold mirrors .......................................................................................... 13 Installation of relay optics .................................................................................................................... 15 Installation of microlens arrays and exchanger .................................................................................... 17 Optical testing and final alignment ........................................................................................ 19 Appendix ................................................................................................................................21 5.1 5.1.1 5.1.2 5.1.3 Discussion of additional errors ............................................................................................... 21 Spherical (and other high order radially symmetric modes) ................................................................ 21 Coma .................................................................................................................................................... 22 Astigmatism ......................................................................................................................................... 22 5.2 Appendix A – October 18th, 2009 alignment ......................................................................... 22 5.3 Appendix B – HOWFS alignment table worksheet .............................................................. 23 3 1 INTRODUCTION 1.1 Acronyms and Definitions FWHM PSF RMS HOWFS sXX subaperture size Full-Width at Half-Maximum Point Spread Function Root Mean-Squared High-order wavefront sensor Spatial sampling mode of the HOWFS. XX denotes the number of samples, either 64, 32, 16 or 8. the size of a lenslet-array lenslet, projected onto the detector 1.2 Purpose The purpose of this document is to present the step-by-step alignment procedure for the highorder wavefront sensor for PALM-3000 as well as other supporting information. 1.3 Scope This document attempts to provide all of the information required, including alignment tools and supporting software, for optical alignment of the high-order wavefront sensor. 1.4 Related Documents C. Baranec, “High-order wavefront sensing system for PALM-3000,” Proc. SPIE Adaptive Optics Systems, eds. N. Hubin, C. Max & P. Wizinowich, 7015, 2008. A. Bouchez, R. Dekany, J. Angione, C. Baranec, K. Bui, R. Burruss, J. Crepp, E. Croner, J. Cromer, S. Guiwits, D. Hale. J. Henning, D. Palmer, J. Roberts, M. Troy, T. Truong & J. Zolkower, “Status of the PALM-3000 high-order adaptive optics system,” Proc. SPIE Astronomical Adaptive Optics Systems and Applications IV, eds. R. Tyson & M. Hart, 7439B, 2009. 1.5 Optical Design Summary 1.5.1 Basic System Parameters PALM-3000 Plate scale: 0.390 mm/arc second F/#: 15.77 Number of illuminated subapertures in s64 mode: 63.95 wide by 62.88 tall. (Centered on a lenslet array) Telescope pupil reimaged to lenslet array. Bandwidth: 450-950 nm 4 1.5.2 Design and component functions The entrance to the wavefront sensor will be fitted with a field stop that will also function as a spatial filter. The spatial filter consists of two blades forming a square aperture which can be adjusted remotely in size via a piezo-electric flexure mechanism. The spatial filter used in PALM-3000 will have a maximum aperture size of 4 arc sec (1.56 mm) for guiding on solar system objects, and a minimum size of 0.48 arc sec (190 μm) to filter out spatial frequencies above λ/d for the 16 across pupil sampling mode. Support for spatial filtering for the 8 across pupil sampling mode will not be supported because aliasing error will not be the dominant error term in wavefront reconstruction. The second element in the system is a reflective collimator which images the pupil onto the microlens array. The collimator is reflective to control errors in the pupil size as a function of color over the large bandwidth of the sensor. It also introduces enough astigmatism error to match the geometries of the projected pupil, at a 10.5° angle-of-incidence, on the deformable mirror to the projected pupil on the microlens array. A flat is included to fold the beam to ease packaging. The space between the fold flat and microlens array is reserved for a set of optional filters. Immediately before the microlens array is a cylindrical lens which removes the astigmatism induced by the collimating mirror, flattening the local tilts for each of the subaperture while still allowing the projected pupil geometries to be matched. This ensures that the spots in the Shack-Hartmann pattern are located at the center of pixel boundaries and do not use up dynamic range on the wavefront sensor. There are four different microlens arrays which can be selected to be used for wavefront measurement. Downstream of the microlens arrays are the relay optics and detector. The pair of optics act as a 0.3200 demagnification relay to reimage the spots created by the microlens array to the detector. There is room for a beam chopper to support range gating of the Sodium laser guide star between the relay lenses. Note that an atmospheric dispersion corrector is being considered upstream of the spatial filter to control the guide source elongation due to the chromatic effects of the atmosphere. If atmospheric dispersion is not controlled at low zenith angles, the spatial filter will selectively clip the low and high ends of the wavelength range. 2 TELESCOPE SIMULATOR 2.1 Overview The telescope simulator is the main optical tool that will be used in alignment of the HOWFS. It comprises an on-axis laser and an F/15.6175 beam with a pupil imaged at infinity. Figure 1 shows the optical layout of the telescope simulator and figure 2 shows the assembled telescope simulator. Figure 1 Optical design of the telescope simulator. These dimensions are for red (λ = 632 nm) light. 5 Figure 2 Assembled telescope simulator in Cahill lab 15. The telescope simulator is mounted on a 36” by 6” by ½” breadboard. It is supported on the corners by 3” tall fixed posts. The optical beam height of the optics is approximately 4” above the breadboard for an overall beam height of ~7.5”. The fiber source, fed by a 632 nm diode laser, is mounted on an X-Y-Z stage which has all of its actuators set to mid-range. 2.2 Alignment In preparation for alignment of the telescope simulator, make sure that all of the components seen in figure 3 are available. This includes both a red and green diode laser. 1. Lay out all of the components on the breadboard in approximately the correct positions. This is to make sure that everything will fit. Try to get the two fold mirrors as close to the edge as possible. 2. Define the axis of the simulator. a. Install and bolt down the green laser and fold mirror at the far end of the breadboard. (A red HeNe laser can be used instead of the green laser. It will have a more Gaussian beam profile but it will be more difficult to observe the retroreflections off of refractive surfaces.) b. Bolt down the two fold mirrors at the near end of the simulator. 6 3. 4. 5. 6. c. Turn the laser on. It may need to be warmed up by gently placing your hand next to it for several seconds before it starts. (If using the HeNe, wait 30 minutes or until the laser is in thermal equilibrium; it should be almost hot to the touch.) d. Using the tip/tilt adjustments of all of the mounts, establish a beam running from one end of the breadboard to the other which is parallel to and 4” above the breadboard. Make sure that the beam coming off of the last mirror is roughly normal to the end of the breadboard. Install the fiber source. a. With the fiber removed, place the FC fiber chuck in the beam at its approximate z-position. Make sure that the beam is normal to the fiber chuck. b. Use the x and y actuators to center the hole in the fiber chuck with respect to the green laser. c. Insert the fiber into the fiber chuck. d. Place the red laser and collimating coupler off to the side out of the main optical path. Using the tip/tilt adjustments, couple the red laser into the fiber and observe the output from the other end of the fiber. (Alternatively, use a fiber coupled laser source.) e. Tip and tilt the fiber chuck to make sure the fiber output is approximately centered with the on-axis laser path. Remove the fiber, and re-center the fiber chuck hole on the on-axis laser as it will have shifted slightly. Install the first lens. a. Note the orientation of the lens, with the flat side towards the fiber source. b. Place the first lens in the beam at approximately 150 mm from the fiber source taking care to roughly center the lens on the green laser. c. Install the fiber source and check the collimation of the red light with a shear plate and adjust the z-position until the beam is collimated. d. Remove the fiber source and check the alignment of the lens with respect to the green laser. Adjust the tip/tilt and x-y position until the three retro reflections off of the lens surfaces overlap at the fiber chuck hole. e. Iteratively repeat steps b. and c. until the red light is collimated and the lens is aligned to the green laser. Install the stop. a. Use an inside micrometer to place the stop at the proper z-position. For a stop with a thickness of 0.0315”, the distance should be 5.8320” (~5.8290” with PTFE covering the end of the micrometer touching the lens surface) from the first lens surface to the first plane of the stop. b. Roughly center the stop on the green laser. c. Ensure that the stop is normal to the on-axis laser by placing a flat mirror against the stop and check the location of the back reflection. Tip and tilt the stop as necessary. Shims in the stop holder may be helpful to get proper tilt. Install the second lens. a. Again, note the orientation of the lens with the flat side now away from the fiber source. b. Using an inside micrometer, place the lens at a distance of 5.8320” (~5.8290” with PTFE covering the end of the micrometer touching the lens surface) away from the back surface of the stop. 7 c. Adjust the tip/tilt and x-y position of the lens until the three retro reflections off of the lens surfaces overlap and are directed back towards the green laser. It may be necessary to put a card with a small hole near the stop to see the retro reflections. 7. Check focus. a. Install the fiber source into the fiber chuck. b. Use a card to estimate the position of the focal point after the last fold mirror. 8. Align the stop. a. Shine the on-axis laser normal against a flat surface (lab wall) a large distance away, and mark its location. b. Install the fiber and look at its footprint. Shift the stop in x and y until the footprint pattern is centered on the on-axis laser location mark. 3 LABVIEW ALIGNMENT TOOL 3.1 Overview The LabVIEW alignment tool was developed to use feedback from the CCD50 in order to aid in the alignment of the HOWFS. This tool is a modified version of the server/viewer software originally developed by Thomas Stalcup (tstalcup@keck.hawaii.edu) for the MMT LGS AO system. I have since augmented it to provide real time image and wavefront sensor analysis including center-of-mass determination, projection into Zernike and rotation modes and other merit function capability. 3.2 Procedure for starting 1. Once the host computer is powered on and started, log on to windows. 2. Load PDVshow. a. It will prompt for a program; select the ‘SciMeasure CCD50: Lil Joe 128 x 128 16 Bit CL using Generic DLL’ mode. b. Click on the menu bar: Camera Programming. c. Enter ‘@PRG5’ into the box and hit Enter. d. Close PDVshow. 3. Load Slim Joe. a. Click on the ‘1246 Hz 128^2’ tab. b. Slide the gain control to ‘HI’. c. Close Slim Joe. 4. Load the Camera Server. a. Click on the CCD_Server shortcut on the desktop. (This launches the camera_server.vi within LabVIEW.) b. Once loaded, push the right arrow near the menu bar to run. If the program needs to be stopped at a later time, push the ‘STOP’ button in the middle of the window. 5. Load the Camera Viewer. a. Click on the P3K_WFS shortcut on the desktop. (This launches the p3k_viewer_with_recon.vi within LabVIEW.) b. Once loaded, push the right arrow near the menu bar to run. If the program needs to be stopped at a later time, push the ‘EXIT’ button in the upper right of the window. 8 3.3 Explanation and use of the tool Figure 3 shows the front panel of the LabVIEW alignment tool. The tool is divided into three general areas: Camera and image controls in the upper left, camera display on the right and analysis of the images on the lower left. Figure 3 LabVIEW alignment tool front panel/GUI. 3.3.1 Camera and image controls There are four tabs used for controlling the camera. Generally the Image controls tab is the most useful and will be all that is covered here. The ‘Dark Sub’ tab toggles between doing nothing and subtracting the stored dark frame from the camera data before being sent to the camera display. The ‘Take Dark’ tab will create a temporary dark frame to be used by the ‘Dark Sub’ tab. Enter the number of frames to average over to the right of the tab, turn off the source, and hit the tab. In the Command Response window, the number of frames will run up to the requested number and return ‘dark complete, EOF’ when finished. The ‘Avg Frame’ tab will, when activated, display an average frame of the indicated number instead of the live image. Hit the ‘Frame Updates’ tab to restore a live image. 9 The ‘Save Frames’ tabs will save the indicated number of frames to a file on disk. There will be a single file [unresolved format – to be updated] with the current dark frame saved as the first image. The conversion method controls the image scaling on the right. This can be set to a number of different values. For the ‘Given Range’ option, select the upper and lower limits with the nearby sliders. 3.3.2 Camera display The camera display shows the output of the CCD50 camera. Various controls can change what is seen in the display. The ‘Frame Updates’ tab changes between capturing and displaying new images as they are captured and halting the display of new frames. The ‘Boxes’ tab turns the green boxes which show the location of subapertures on and off. The type and number of boxes will change depending on the option selected in the analysis display ‘Sampling Selector’ box. For the ‘Frame COM’ mode, various box sizes centered on the display will appear. 3.3.3 Analysis display The analysis display will perform a real time analysis of the current frame shown in the camera display. The ‘Sampling Selector’ lets the user switch between analysis of the four different lenslet array modes (s64, s32, s16 and s8) and a ‘Frame COM’ mode. A slider called ‘Leak’ with values from 0 to 1 will enable leaky integration on all displayed analysis values. When in any of the lenslet array modes, the histogram window will show the reconstructed Zernike mode amplitudes in waves at 632 nm from orders 1 to 8 with many of the modes labeled by name. In addition, the RMS slope values in pixels, RMS wavefront error in nm over Zernike orders 1-8, RMS wavefront error calculated from the pixel slope values and the rotation angle in degrees will be displayed. The large rotation radial dial is useful for checking the Shack-Hartmann rotation from a distance and displays 100ths of a degree. The X-COM and Y-COM values are not calculated in the lenslet array modes. When in the ‘Frame COM’ mode, only the X-COM and Y-COM values will be displayed. They will indicate the center-of-mass of the image in units of pixels from the center of the detector. 4 HOWFS OPTICS 4.1 Optical Design The optical design and purpose of the high-order wavefront sensor (HOWFS) is described in detail in Baranec (SPIE 2008.) In summary, there is first a field stop/spatial filter, then 10 collimating and fold mirror, another fold, a cylindrical lens, lenslet arrays and a relay system before light is incident on the CCD50 detector. A Zemax layout of the design with important dimensions is presented in figure 4. A picture of the HOWFS is shown in figure 5. Figure 4 Optical design of the high-order wavefront sensor with important dimensions noted. The most current Zemax design of the system is ‘HOWFS_FINAL_Oct3_2009.zmx’ and is embedded in this document below. Figure 5 Assembled HOWFS in Cahill lab 15. The two simulator fold mirrors are in the lower right. 11 4.2 Mechanical setup In preparation for alignment, it is necessary to first assemble all of the mechanical parts of the HOWFS. Most importantly, the large base plate has a smaller interface plate underneath which is held on by 8x ¼-20 bolts. The interface plate should be separated and installed on the optical bench where the HOWFS will be assembled or realigned. With the central counter-bored holes facing up, attach the plate to 4 fixed posts that each have a height of 2.75”. Clamp the posts onto the optical bench. Make sure that small optics platform that holds the collimating mirror, fold flat and cylindrical lens is assembled on the large base plate before proceeding. Now, place the large base plate onto the smaller interface plate and bolt them together. When integrating with the adaptive optics system, the smaller interface plate will be attached instead to the Aerotech ATS150 focus stage. Attach the Newport focus stage (UTS50) to the large base plate using M6 bolts. Attach the focus stage base plate to the UTS50 using M5 bolts. Run the stage to its most forward position (towards the field stop.) Install the lenslet array assembly leaving a small (slightly less than a business card) gap between the focus stage base plate and the vertical Newport MPA-CC linear stage. 4.3 Optical alignment 4.3.1 Definition of focal point and optical axis The first part of the optical alignment involves defining the focal point and optical axis of the HOWFS. This will involve adjustment of the telescope simulator location and its output fold mirrors. Figure 6 shows the target point in space for the telescope simulator and HOWFS common focus. Figure 6 Solidworks model showing the physical relation between the large base plate and the HOWFS optics. Measured values are based off of the assembled HOWFS as of October 2009. 1. Draw the optical axis and focal point on the HOWFS structure. (These have been scribes as of October 2009.) 12 2. 3. 4. 5. a. Draw a line parallel to the front of the base plate that is 0.948” back from the front. See the red dY dimension in figure 6. b. Mark the optical axis on the front part of the baseplate. Draw a line that is 3.121” over from the edge and pointing back. See the blue dZ dimension in figure 6. c. On the CCD50 front plates, there should be a scribe mark showing the horizontal center of the CCD50 as well as an offset line which is 13.983 mm below the center of the camera head. If not, then draw these in or scribe them with a height gauge. Install the temporary field stop. a. Setup an adjustable sized iris (not a zero aperture iris) on an adjustable height post. b. Close down the iris as far as possible and use a height gauge to set the height of the hole to 3.871” c. Place the iris on the base plate such that the opening is as close as possible to the intersection of the lines drawn on the base plate in steps 1.a. and b. when viewed from above. It may be helpful to use squares lined up with the scribe marks when viewed at angles. Positioning of the simulator on-axis laser. a. Turn on the green on-axis laser. b. Move the simulator around, and adjust the two output fold mirrors to get the laser going through the field stop. c. Adjust the two mirrors to get the beam to both go through the field stop and hit the intersection of the horizontal and offset lines on the CCD50 front plate. (See 1.c.) Adjust the simulator z-position to get proper focus. a. Install the red fiber source. b. Check that the red light also goes through the field stop opening. c. Close down the stop and place a piece of card behind the opening. d. Without tilting or rotating the simulator, push forward and backwards to get the fiber source in focus on the card. Final adjustment. a. Reiterate through steps 3. and 4. to get the axis in the correct position and direction, and the focus to be in the correct location. 4.3.2 Alignment of collimating and fold mirrors The next part of the optical alignment involves installing the two mirrors in the HOWFS. The focal length on the collimating mirror will determine the overall size of the reimaged pupil on the lenslet arrays and the angle of incidence on the mirror will determine the amount of induced astigmatism which will compress the pupil in the vertical direction. For an angle of incidence of 10.5° on the high-order deformable mirror, the ratio of major to minor axes in the pupil will need to be 1.0170. The pupil will ultimately need to be 9.5925 mm in width, and 9.4320 in height to achieve the correct ratio and size. In addition, the on-axis laser beam reflecting off of the fold mirror will need to be centered on the CCD50 and be parallel to the axis of the UTS50 stage. 1. Installation of the collimating mirror. 13 a. Attach the ½” tip/tilt mount to the custom tilted fixed post on the small optics platform in the middle of the HOWFS. Make sure the mirror will be pointing upwards at ~7.5° and such that the returning folded beam will clear the top of the mount. Install the mirror in the mount. b. Remove the fiber source and turn on the green on-axis laser. c. Place the mirror in the beam in approximately the correct location. d. The beam should be slightly high of center on the mirror. e. Add shims to the underside of the mount until the beam is centered on the mirror. Suggested shims are 0.0125”, 0.015” or 0.020”. 2. Installation of the fold mirror. a. Make sure there is a lens cap over the CCD50. While the green laser will not harm the CCD50, it is best to avoid blasting it anyway. b. Place the fold mirror in its mount and attach it to the small optics platform. c. Slide the mount left and right until it is centered on the green laser and lock down the mount. d. Use an inside micrometer to check the distance between the two mirrors is 54.512 mm or 2.146”. If not, use all three fold mirror actuators to piston the mirror to the correct position. e. Adjust the tip/tilt of the fold mirror to place the green laser in the center of the lens cap. 3. Rough alignment of mirrors. a. Switch to the fiber source. b. Check the collimation of the beam going to the CCD50 in the left-right direction. This can be done with a shear plate when viewed from the side - not the top - of the wavefront sensor. c. If the collimation needs to be changed, unclamp the collimating mirror mount and move it forwards and backwards until the beam is close (but not necessarily exactly) collimated. d. Check the footprint of the beam on the collimating mirror with a piece of transparency and make sure it is centered. If not, recenter and repeat the collimation check and adjustment. 4. Co-alignment with UTS50 axis a. Setup the LabVIEW GUI so that it is reading frames off of the CCD50 and set it to the ‘Frame COM’ mode. This will measure the center-of-mass of the entire frame, so take new backgrounds of ~5000 frames when appropriate. b. Load up the ESP utility. Setup up the focus stage axis so that you can move the stage from one end of its travel to the other with a single click. c. Place an ND (4-6) either right in front of the CCD50 aperture or near the laser aperture. [Still need to decide what’s best because no matter what you do the beam walks or tilts with the addition on the NDs] d. Move the focus stage all the way forward. e. Tip and tilt the fold mirror until the beam is centered on the CCD50. These actuators require 2 mm Allen keys for adjustment. Use the CoM-X and CoM-Y measurements. Get the absolute value of these numbers to be less than 0.1000 pixels. See figure 7. 14 Figure 7 Images of the on-axis laser when aligning the laser beam to the UTS50 axis and CCD50 center. f. Next, move the UTS50 stage all the way (or ~50 mm) back. Notice the direction and magnitude that the spot moves. g. Return the stage to the forward position. h. Using the T/T adjustments on the collimating mirror, move the spot in the same direction that was observed in step f., with a magnitude of ~5-10 times greater. i. Use the T/T adjustment of the fold mirror to recenter the spot on the camera to within 0.1 pixels again. j. Repeat steps f. through i. until the spot position in less than 0.1 pixels from zero (the center of the CCD50) in both extreme positions of the UTS50. [This is a relatively fast process compared to other tip/tilt convergence methods.] 5. Install the cylindrical lens a. Install the cylindrical lens in the 1” lens mount making sure the proper orientation of the flat (towards the spatial filter) and concave surfaces (towards the CCD50.) b. Check the mark on the cylindrical lens and rotate it such that there is no power in the sideways direction and negative power in the vertical direction. c. Install the lens into the optical path. d. Using retro-reflections from the on-axis laser, center the cylindrical lens. e. Decenter the lens vertically by using the top actuator on the lens mount. Turn the actuator by 3.65 turns clockwise which corresponds to a distance of 0.927 mm. f. Go back and repeat all of step 4, realigning the on-axis laser with the CCD50, this time getting the spot position to less than 0.05 pixels from the CCD50 center. g. Insert the fiber source and check the collimation with a shear plate in both the horizontal and vertical directions. 4.3.3 Installation of relay optics This next step involves the installation of the relay optics referred to as R1 (closest to the lenslet array) and R2 (closest to the CCD50.) 15 1. Installation of R2. a. With the on-axis laser on and no NDs installed, let the laser fall directly on the CCD50. b. Drop in R2 to the approximate correct position as seen in figure 5. Note the correct orientation of the lens, flat negative element towards the CCD50. c. Using the retro reflections off of the lens surfaces, normalize and center the lens on the on-axis laser. d. Switch to the fiber source. e. Image the beam footprint on the CCD50. f. Adjust the z-position of R2 until the beam footprint is 105.05 pixels wide when using the telescope simulator. (If using the testbed or bench relay, this should be 104.04 pixels). It may not necessarily be centered, this is ok. In ‘Frame COM’ mode, turn the boxes ‘on’ and switch to the 104 ‘box size’. g. Remove the fiber and go back to step 3. Repeat until the lens is both aligned with the laser axis and the beam footprint is the correct size. 2. Establish fiber axis. a. With the fiber installed, now check the centration of the beam footprint on the CCD50. b. Similar to step 4 of § 4.3.2., center the footprint as seen on the CCD50 by adjusting the tip and tilt on the collimating and fold mirrors for both the near and far positions of the UTS50. Try to get the centration to less than 0.03 pixels (or best effort.) 3. PixeLINK alignment. a. Remove the CCD50 and put the PixeLINK camera in its place. There is a small jig to hold the PixeLINK with a translation stage. b. Install the fiber source. c. Load the PixeLINK software and image the beam footprint. Measure the vertical height of the beam footprint by first saving an image to a .tiff and opening the file with Microsoft Paint. MSPaint displays pointer coordinates, so measure the maximum y extent of the beam. d. Adjust the z position of the PixeLINK to get measurement of the beam at 720.3 (vertical) and 708.2 (horizontal) pixels. If using the simulator source, 713.4 (vertical) and 701.4 (horizontal) pixels if using the testbed/bench relay optics. e. Once the beam size is correct, note the positions of the vertical and horizontal extrema of the footprint and calculate its center position. 4. Installation of R1 The idea in this step is to use the laser to get the approximate tilt correct of R1 (since it now does not exactly define the axis), while using the footprint size and location on the PixeLINK camera to establish the x-, y- and z-positions of R1. a. Similar to the installation of R2, put the lens in the approximate correct position as seen in figure 5, taking note to get the proper orientation of the lens, flat negative element towards the lenslet arrays. b. Using the on-axis laser, align the lens to the laser. c. Look at the vertical size of the beam footprint on the PixeLINK. 16 d. Adjust the z position of R2 until the vertical footprint size is 885.6 (vertical) and 871.0 (horizontal) pixels for the simulator, 877.2 (vertical) and 862.8 (horizontal) pixels for the testbed/bench relay. e. Once the proper footprint size is established, decenter the lens until the footprint is centered in the same location on the PixeLINK as was established in step 2.e. f. Zero the tip and tilt of the lens again with respect to the on-axis laser and repeat step e. The centration of the lens with respect to the laser may not be established. g. Repeat steps b. to f. until the footprint is the proper size and the lens is centered on the laser. 4.3.4 Installation of microlens arrays and exchanger The microlens arrays are already all installed in the exchanger and in the proper positions. If necessary, instructions on mounting arrays will be documented in a future release. The linear stages of the HOWFS can all be driven in Windows using the ESP-utility. Figure 8 shows the features of this program that will be used most frequently. Figure 8 The ESP utility for driving the linear stages in Windows. The Jog window should be set to the ‘Indexed’ mode. Select the axis on the left, set distance in the top and click a button to move either positive or negative in that axis. The Home window can be used to move either axis one to the ‘Positive limit and index’ position or axes 2 and 3 to the previously established ‘Zero’ position. 17 1. Measurement of microlens positions. a. If not already done, move the exchanger such that the simulator light goes unobstructed through the central hole. By eye, center the beam on the hole. b. In the ESP Position window, hit the Zero button on channels 2 and 3. It should never be necessary to zero these channels again, so cover up that part of this window. c. In the ESP Home window, set Axis 1 to ‘Positive limit and index’. This will move the UTS50 stage all the way forward. d. Start by finding the position of the first microlens array, go to -10 mm in both channel 2 and 3. e. There will be light coming through part of one of the microlens arrays (s8). f. At this point, move the PixeLINK camera in z so that the camera slightly overfocuses on the microlens array surface and the microlens boundaries appear bright. See figure 9. g. Adjust channels 2 and 3 until the central microlens of the array are centered on the illumination pattern. Note that there are more microlenses than the actual sampling: s8 has 10 across, s16 has 20 across, s32 has 40 across, and s64 has 80 across. Use the patterns made by the grid of lines to center the arrays. Align the arrays to the nearest 10 µm, which corresponds to approximately 1 pixel resolution on the PixeLINK camera. h. Once the array has been centered, write down the values for channels 2 and 3. i. Return to the center by using the Home window’s Axis 2 and 3 ‘Zero position” command. j. Find the center positions for the other three lenslet arrays and write them down. Figure 9 Slightly over-focused images of the s8 (left) and s64 (right) microlens arrays on the PixeLINK camera. 2. (Optional) Re-establish the proper focus positions of the microlens arrays. a. Go back to the zero position on channel 2 and 3. 18 b. Move the PixeLINK in z such that the footprint corresponds to that seen in § 4.3.3 step 4.d. c. For each of the different microlens configurations, change channel 1 until the spots on the PixeLINK are at ‘best focus.’ Starting values are: s8 (-40.0), s16 (18.0), s32 (-11.9) and s64 (-7.9). 4.4 Optical testing and final alignment This is the final stage of the alignment process, putting the CCD50 back in the system, putting the final tweaks on the R1 position and the rotation of the lenslet arrays. 1. Install the CCD50 camera. a. Remove the PixeLINK camera. b. Make sure that the small Kapton spacers are near the three camera mounting boltholes. If not, tape 2 small squares of Kapton tape over each hole and use a hobby knife to cut out clearance for the ¼-20 bolts. c. Put the CCD50 back in its original position and make sure the bolts are in reasonably tight. (It might be worth putting a torque specification here for repeatability.) Note that the camera is held down on a three point mount with three bolts. 2. Make initial measurements of the alignment errors. a. For each of the different microlens array configurations, input the premeasured values for channels 1, 2 and 3 on the ESP controller. b. For each configuration, select the appropriate reconstructor from the LabVIEW GUI. c. Set the fiber source such that the peak pixel value is around 4000. This should avoid exceeding the putative full-well depth and avoid any intensity nonlinearities. d. Block or turn the fiber off and take a background, before turning the source back on. e. One of the first things to notice is how the tip and tilt measurements are large. This should be due to a slight misalignment of the mircolens array, since it was only possible to get it registered in section 4.3.4 to ~10 µm. f. Adjust channels 2 and 3 of the ESP controller by steps of 1 µm to get the tip and tilt modes to be roughly zero. Moving positive in channel 2 will cause tip to go in the positive direction; moving positive in channel 3 will cause tilt to go in the negative direction. g. Once the system has settled, hit the ‘Avg Frame’ button and take an average of a few thousand images. At the end of the average, the GUI will update, displaying the alignment metrics of the averaged frame. Hit the ‘Frame Updates Off’ to go back to a live image. h. At this point it is useful to make a chart of the summarized alignment metrics and delta positions in channels 2 and 3. See table 1. Fill in the table for each configuration. i. Ideally, the magnitude of the Δ2 and Δ3 columns should be less than 10 µm, although up to 20 µm may be acceptable. If they are not, this may be indicative of a misalignment somewhere in the previous steps. 19 Table 1 Spreadsheet for recording alignment positions and metrics. s 8 16 32 64 Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. mm mm mm µm µm λ λ λ λ pix. nm nm deg 3. Microlens array rotation adjustment a. Go back to each microlens configuration from step 2, including the Δ positions. b. Confirm the rotation measurement in degrees. c. See figure 10. The microlens arrays are mounted to cylinders that can rotate. The cylinders have a set of two small holes drilled ~1 mm behind the array mounting surface in which a 0.05” hex wrench (or other appropriate instrument) can be inserted to rotate the array. There are two set screws that hold in the cylinders to a larger rectangular block which mounts to the two linear stages. Figure 10 Image of the rotation adjustment for the microlens arrays in their exchanger mechanism. d. If the rotation is far off, then unlock the set screws and get the rotation reasonable by eye and lock the set screws. They should be reasonably snug, but not over tightened. e. Place the 0.050” hex wrench in the adjustment holes and give a quick firm tap of the wrench. This should rotate the array by a measurable amount. It may take some time to master how hard to tap the wrench to get the array to rotate. f. Adjust the rotation of the array, using feedback from the LabVIEW GUI, until the magnitude of rotation is less than 1E-3 degrees, it is difficult to get the rotation 20 much less that 5E-4. (The large visible dial that shows rotation in the GUI is used for final touches on the rotation and displays units of 1E-2 degrees.) g. Once all of the arrays are rotated, null out the tilt modes like in step 1.f., take an average frame and record the new alignment positions and metrics. 4. Focus adjustments Typically there will be a discrepancy in the measured focus mode between the different configurations. This is due primarily to a magnification error in the relay lens pair. Proceed with this adjustment if this is the case. a. Switch to the s8 configuration, making sure to zero out any additional measured tip and tilt by moving the array position (shouldn’t be more than 2 or 3 µm.) b. Make note of the focus position with another average frame measurement. c. Go back to a live image, possibly turning up the leak coefficient to 0.5 to keep the measurement from moving too much. d. Using the three 100-TPI actuators on the back of the R1 lens mount, piston the lens forwards or backwards until the measured focus mode goes to 0 waves. As a reference, moving each actuator clockwise by approximately half a turn will cause the focus measurement in s8 to go from +0.2 waves to 0 waves. e. Repeat a measurement of the alignment positions and metrics for all of the modes. f. The focus measurement for each of the modes should all be closer together and all closer to zero. g. Repeat the piston adjustment of R1 until all of the modes are close to 0 waves of focus. (See appendix 6.1 for the best focus in each configuration.) h. It is possible that the beam isn’t perfectly collimated, in which case it is more important to get all of the different configurations measuring the same focus coefficient. Once they all read basically the same value, move the fiber source forward in z to null out the focus. Make sure to adjust the fiber x and y position to not add any tip or tilt as the z-stage that the fiber is on may not be parallel with the optical axis of the telescope simulator. 5 APPENDIX 5.1 Discussion of additional errors 5.1.1 Spherical (and other high order radially symmetric modes) If there is any residual spherical aberration measured, this could be due to distortion in the relay lens pair. From the relay design, this is primarily caused by an error in distance between R2 and the CCD50. This can be adjusted by pistoning R2 in a similar manner to R1. Warning: since the beam is only ~1.6 mm wide on R2, it is very sensitive to any mis-alignments. Adjusting piston may result in slight tilting or decentering of R2 from which it is difficult to recover and will likely set you back to section. The Zemax file for the relay is attached below: 21 5.1.2 Coma The largest amount of uncorrectable internal optical error in the HOWFS should be coma. In Zernike coefficients, the coma should be 18.5 nm RMS or 52.4 nm P-V. The LabVIEW GUI should therefore be displaying ~+0.03 waves at λ = 635 nm, but is currently tending to hover around the +0.08±0.01 waves, which is more consistent with the P-V coefficient. The Zemax design that measures the wavefront error going up to the microlens array is included below for reference in order to solve this mystery in the future: 5.1.3 Astigmatism From the Zemax design presented in 5.1.2, it can be seen that there should be 0 nm of 45° astigmatism and only a very small, 5 nm RMS, amount of 90° astigmatism. This should correspond to less than 1/100 of a wave. Therefore the A45 and A90 measurements should be much smaller than measured in Appendix A. 5.2 Appendix A – October 18th, 2009 alignment s 8 16 32 64 Ch.1 Ch. 2 mm mm Ch. 3 Δ2 Δ3 Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. mm µm µm λ λ λ λ pix. nm nm deg -40.0 -11.521 -11.254 -18.0 11.321 -11.9 11.156 -7.9 11.415 -1 +6 -0.01 +0.02 -0.01 -0.005 0.1464 187 156 -4E-4 -11.206 +1 +4 11.613 -14 +3 -0.05 -0.08 -0.03 +0.03 0.0851 218 141 1E-4 +0.11 +0.06 -0.09 0.000 0.0433 128 116 8E-4 11.592 -5 +2 +0.12 +0.06 -0.08 0.000 0.0265 109 116 -3E-4 22 5.3 Appendix B – HOWFS alignment table worksheet Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Alignment Description/Changes: Ch.1 Ch. 2 Ch. 3 Δ2 Δ3 s mm mm mm µm µm 8 16 32 64 Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg Foc. A45 A90 Sph. RMS WFE-P WFE-Z Rot. λ λ λ λ pix. nm nm deg 23