Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Kennedy: Theory of Environmental Regulation (Draft 1)
4.4 EXERCISE: DEFENSIVE ACTION AGAINST CLIMATE CHANGE
In this exercise you will examine the optimal mix of defensive action and abatement in
climate change policy in the context of a simple static model. You will first solve a
planning problem that yields the global surplus-maximizing policy when there are n
identical countries. You will then derive the optimal policies in a simplified setting where
n = 2 but where the two countries differ with respect to GDP. You will then derive the
equilibrium policies in a non-cooperative game between the two countries. A key point of
interest throughout is the relationship between welfare and the cost of defensive action.
4.4.1 A Simple Model with Abatement and Adaptation
Consider a setting with two countries in which country i has output yi , which we take as
given. The cost of producing yi is
(4.23)
c( yi , xi ) = ωi xi2 yi
where ωi > 0 is a fixed productivity parameter, and xi ∈ [0,1] is a choice variable that
determines the cleanliness of production. Production of yi using process xi generates
emissions
(4.24)
ei = (1 − xi ) y i
Damage to country i from climate change is
(4.25)
d i = δ i (1 − ai ) Eyi
where
n
(4.26)
E = ∑ ei
i =1
and δ i > 0 is a fixed damage parameter, and ai ∈ [0,1] is a choice variable that
determines the level of defensive action (or adaptation) undertaken by country i. The cost
of defensive action is
(4.27)
k (ai , yi ) = θ i ai2 yi
where θ i > 0 is a fixed cost parameter .
1
Kennedy: Theory of Environmental Regulation (Draft 1)
4.4-2 The Global Planning Problem with Identical Countries
Suppose the countries are identical in every respect. Thus, ωi = ω ∀i , δ i = δ ∀i ,
θ i = θ ∀i , and yi = y ∀i . Then the global planning problem involves choosing x and
a (identically across countries) to minimize total cost for a representative country:
(4.28)
min ωx 2 y + δ (1 − a) Ey + θa 2 y
x,a
where
(4.29)
E = n(1 − x) y
Depending on parameter values, the solution to this problem could be interior, with
x ∈ (0,1) and a ∈ (0,1) , or it could be at one of two corners, with x = 1 and a = 0 , or
with x = 0 and a = 1 . We will focus on an interior solution, and impose the following
parameter restrictions accordingly:
(4.30)
δ < δ max ≡
2ω
ny
and
(4.31)
θ > θ min ≡
δny
2
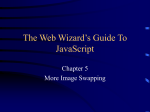
Together these restrictions mean that we are confining attention to the shaded region of
the parameter space in Figure 1. We will need to keep that in mind throughout the
analysis. (The meaning of the labels “R1” and “R2” in Figure 1 will become clear in a
moment).
Solve the global planning problem and confirm that the interior solution is
(4.32)
a* =
δny (2ω − δny )
4θω − δ 2 n 2 y 2
x* =
δny (2θ − δny )
4θω − δ 2 n 2 y 2
and
(4.33)
2
Kennedy: Theory of Environmental Regulation (Draft 1)
Plot a * and x * against θ (for θ ≥ 12 ) on the same graph, using the following parameter
values: n = 2 , y = 1 , ω = 1 and δ = 12 . Call this Figure 2. Provide a brief explanation of
the plotted relationships.
We will characterize the policy mix by the ratio
m=
(4.34)
x
a
Show that m* < 1 for θ < ω , and m* > 1 for θ > ω . Relate this dichotomy to Figure 2,
and in that figure label as “R1” the region where m* < 1 , and as “R2” the region where
m* > 1 . (These correspond to the eponymous regions in Figure 1).
Now let us consider the relationship between defensive action and damage. Let d *
denote damage for a representative country under the optimal policy. Show that
(a) if δ <
(b) if
(4.35)
δ max
δ max
2
2
then d * is increasing monotonically in θ ; but
< δ < δ max then d * reaches a maximum at
δ 2n2 y 2
θ =
4(δny − ω )
~
Consider these cases in turn. First, plot d * against θ (for θ ≥ 14 ) using n = 2 , y = 1 ,
ω = 1 and δ = 14 . This is case (a). On the same graph plot a * using the same parameter
values. Call this Figure 3. What is the relationship between a * and d * ?
Now plot d * against θ (for θ ≥ 34 ) using n = 2 , y = 1 , ω = 1 and δ = 34 . This is case (b).
On the same graph plot a * using the same parameter values. Call this Figure 4. What is
the relationship between a * and d * ? Explain why more defensive action can optimally
lead to more damage in this case.
3
Kennedy: Theory of Environmental Regulation (Draft 1)
We will now investigate the relationship between the optimal policy and δ . First, plot a *
and x * against δ (for δ ≤ 34 ) on the same graph, using the following parameter values:
n = 2 , y = 1 , ω = 1 and θ = 34 . Note that θ < ω for these values; they lie in Region 1.
Label this Figure 5. Explain the plotted relationships.
Now plot a * and x * against δ (for δ ≤ 1) on the same graph, using the following
parameter values: n = 2 , y = 1 , ω = 1 and θ = 54 . Note that θ > ω for these values; they
lie in Region 2. Label this Figure 6. Explain the plotted relationships.
4.4-3 The Global Planning Problem with Heterogeneous Countries
We will introduce only a limited element of heterogeneity across countries: differences in
GDP. We will continue to assume that ωi = ω ∀i , δ i = δ ∀i and θ i = θ ∀i . We also
simplify the problem somewhat and assume that n = 2 ; that is, there are only two
countries. We assume that country 1 has a larger GDP than country 2. Aggregate global
output is
(4.36)
Y = y1 + y 2
The global planning problem is to minimize global cost:
(4.37)
min ωx12 y1 + δ (1 − a1 ) Ey1 + θa12 y1 + ωx22 y 2 + δ (1 − a2 ) Ey 2 + θa22 y2
{ x},{ a}
where
(4.38)
E = (1 − x1 ) y1 + (1 − x2 ) y 2
Confirm that the solution to this problem is
(4.39)
ai* = a * =
δY (2ω − δY )
∀i
4θω − δ 2Y 2
xi* = x * =
δY (2θ − δY )
∀i
4θω − δ 2Y 2
and
(4.40)
4
Kennedy: Theory of Environmental Regulation (Draft 1)
Note that these optimal policies are a straightforward generalization of the optimal
policies in the setting with identical countries, as described by (4.32) and (4.33) above,
where we can simply reinterpret y as average GDP. Note too that the optimal policy is
the same for all countries regardless of GDP; economic size per se makes no difference
to the optimal solution. Finally, note that our parameter restrictions from (4.30) and
(4.31) above ensure that (4.39) and (4.40) describe a valid interior optimum.
Plot the optimal policy mix, defined by
(4.41)
m* =
x*
a*
against θ (for θ ≥ 34 ) for the following parameter values: y1 = 1 , y 2 = 12 , ω = 1 and
δ = 1 . Call this Figure 7. Explain the sign of the slope of this graph.
Construct total cost for each country under the optimal policies, denoted
(4.42)
Ci* ≡ ω ( xi* ) 2 yi + δ (1 − ai* ) E * yi + θ (ai* ) 2 yi
where
(4.43)
E * = (1 − x1* ) y1 + (1 − x2* ) y 2
Confirm that
(4.44)
∂C1* y1δ 2Y 2 (2ω − δY ) 2
=
(4ωθ − δ 2Y 2 ) 2
∂θ
and
(4.45)
∂C2* y 2δ 2Y 2 (2ω − δY ) 2
=
(4ωθ − δ 2Y 2 ) 2
∂θ
Explain the sign of these derivatives.
Plot C1* and C 2* against θ (for θ ≥ 34 ) for the following parameter values: y1 = 1 ,
y 2 = 12 , ω = 1 and δ = 1 . Call this Figure 8.
5
Kennedy: Theory of Environmental Regulation (Draft 1)
4.4-4 The Non-Cooperative Equilibrium with Heterogeneous Countries
We will now characterize the non-cooperative equilibrium (NCE) to a game in which
each of our two countries chooses their abatement and adaptation policies to minimize
their own domestic cost:
(4.46)
min ωxi2 yi + δ (1 − ai ) Eyi + θai2 yi
xi , ai
Each country takes the policies of the other country as given.
Find the NCE policies, denoted {aˆ i , xˆi } for i = 1 and 2. (Hint: there are four equations to
be solved simultaneously).
Now let
(4.47)
mˆ i =
xˆi
aˆi
denote the NCE policy mix for country i, and confirm that
(4.48)
mˆ 2 y 2
=
mˆ 1
y1
This tells us that the smaller economy relies more heavily on defensive action (relative to
abatement) than the larger economy. Explain this result, making reference to the scope of
control each country has over global emissions.
Reproduce your Figure 7 (which plots m* against θ ) and add to this graph the plots of
m̂1 and m̂2 using the same parameter values ( y1 = 1 , y 2 = 12 , ω = 1 and δ = 1 ). Call this
Figure 9. Explain why m* > mˆ 1 > mˆ 2 for all θ > θ min in your graph.
Construct the total cost for each country under the NCE policies, denoted
(4.49)
Cˆ i ≡ ω ( xˆi ) 2 yi + δ (1 − aˆi ) Eˆ yi + θ (aˆ i ) 2 yi
where
(4.50)
Eˆ = (1 − xˆ1 ) y1 + (1 − xˆ 2 ) y2
6
Kennedy: Theory of Environmental Regulation (Draft 1)
Plot Ĉ1 and C1* against θ over the interval θ ∈ [ 34 ,20] for the following parameter
values: y1 = 1 , y2 = 12 , ω = 1 and δ = 1 . Call this Figure 10. Explain why Cˆ1 > C1* for
all θ > θ min .
Now plot Ĉ 2 and C 2* against θ over the interval θ ∈ [ 34 ,20] for the following parameter
values: y1 = 1 , y2 = 12 , ω = 1 and δ = 1 . Call this Figure 11. Note that Ĉ 2 is not
monotonic in θ . To see this more clearly, plot Ĉ 2 and C 2* against θ over the interval
θ ∈ [ 32 ,20] . Call this Figure 12.
Let θ 2 denote the turning point in Ĉ 2 , defined by
(4.51)
∂Cˆ 2
=0
∂θ θ = θ 2
Find θ 2 and plot it against y 2 ∈ [0, 34 ] for y1 = 1 , ω = 1 and δ = 1 . Note that θ 2 → ∞ as
y 2 → y1 . Call this Figure 13.
Why does Ĉ 2 rise as θ falls towards θ 2 from above, and why does θ 2 → ∞ as y 2 → y1 ?
4.4-5 Pareto Dominance
Note from your Figure 13 that Ĉ 2 appears to approach C 2* as θ gets large. To
investigate this issue further, plot Ĉ 2 and C 2* against θ over the interval θ ∈ [ 32 ,20] for
49
the following parameter values: y1 = 1 , y2 = 100
, ω = 1 and δ = 1 . Call this Figure 14.
This figure tells us that Ĉ 2 and C 2* can cross at high values of θ , in which case the
global optimum does not Pareto-dominate the NCE; the smaller country is worse off.
Let us a derive a sufficient condition for Pareto dominance. Let
(4.52)
ρ≡
y2
y1
7
Kennedy: Theory of Environmental Regulation (Draft 1)
Find a threshold value ρ such that Pareto dominance is assured if ρ ≥ ρ . Hint: take the
limit of domestic costs for each country as θ → ∞ .
8
Kennedy: Theory of Environmental Regulation (Draft 1)
θ
θ=
δny
2
R2
ω
R1
2ω
ny
δ
Figure 1
9