Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Mathematical Models of Systems
DNT 354 - CONTROL PRINCIPLE
Date: 17th July 2008
Prepared by: Megat Syahirul Amin bin Megat Ali
Email: megatsyahirul@unimap.edu.my
CONTENTS
Introduction
Differential Equations of Physical Systems
The Laplace Transform
Transfer Function of Linear Systems
Block Diagram
INTRODUCTIONS
A mathematical model is a set of equations (usually differential
equations) that represents the dynamics of systems.
In practice, the complexity of the system requires some
assumptions in the determination model.
The equations of the mathematical model may be solved using
mathematical tools such as the Laplace Transform.
Before solving the equations, we usually need to linearize
them.
DIFFERENTIAL EQUATIONS
How do we obtain the equations?
Physical law of the process Differential Equation
Examples:
i.
ii.
Mechanical system (Newton’s laws)
Electrical system (Kirchhoff’s laws)
DIFFERENTIAL EQUATIONS
Example: Springer-mass-damper system
The time function of
r(t) sometimes
called forcing
function
Assumption: Wall friction is a viscous force.
f (t ) bv(t )
Linearly proportional
to the velocity
DIFFERENTIAL EQUATIONS
Example: Springer-mass-damper system
Newton’s 2nd Law:
bv(t ) ky(t ) r (t ) Ma (t )
d 2 y (t )
dy (t )
M
b
ky(t ) r (t )
2
dt
dt
DIFFERENTIAL EQUATIONS
Example: RLC Circuit
v(t ) VR VL Vc 0
t
di(t )
1
L
Ri (t ) i( )d v(t )
dt
C0
THE LAPLACE TRANSFORM
The differential equations are transformed into algebraic
equations, which are easier to solve.
The Laplace transformation for a function of time, f(t) is:
F (s) f (t )est dt L{ f (t )}
0
If,
dy
dy
L
{
f
(
t
)}
L
f (t )
, then,
sL{ y (t )} y (0)
dt
dt
d 2 y(t )
dy(t ) dy(0)
Similarly, L 2 sL
dt
dt
dt
d 2 y(t ) 2
dy(0)
s L{ y(t )} sy (0)
Thus, L
2
dt
dt
THE LAPLACE TRANSFORM
Example: Spring-mass-damper dynamic equation
d 2 y (t )
dy (t )
M
b
ky(t ) r (t )
2
dt
dt
Laplace Transform for the equation above:
M [s 2Y (s) sy (0) y (0)] b[sY ( s) y(0)] kY (s) R(s)
When r(t)=0, y(0)= y0 and y (0)=0:
Ms 2Y ( s) Msy 0 bsY ( s) by0 kY ( s) 0
( Ms b) y0
p( s)
Y ( s)
2
Ms bs k q( s)
THE LAPLACE TRANSFORM
Example: Spring-mass-damper dynamic equation
( Ms b) y0
p( s)
Y ( s)
2
Ms bs k q( s)
Some Definitions
i.
q(s) = 0 is called characteristic equation
(C.E.) because the roots of this equation
determine the character of the time
response.
ii.
The roots of C.E are also called the poles
of the system.
iii.
The roots of numerator polynomial p(s)
are called the zeros of the system.
THE LAPLACE TRANSFORM
Transform table:
f(t)
F(s)
1.
δ(t)
1
Impulse function
2.
u(t)
1
s
Step function
3.
t u(t)
1
s2
Ramp function
4.
tn
5.
e-at
u(t)
u(t)
n!
s n 1
1
sa
6.
sin t u(t)
s2 2
7.
cos t u(t)
s
s2 2
THE LAPLACE TRANSFORM
Transform
Properties
THE LAPLACE TRANSFORM
Example: Find the Laplace Transform for the following.
i.
Unit function:
f (t ) 1
ii.
Ramp function:
f (t ) t
iii.
Step function:
f (t ) Ae at
THE LAPLACE TRANSFORM
Transform Theorem
i.
Differentiation Theorem
df (t )
L{
} sF ( s ) f (0)
dt
d 2 f (t )
2
(0)
L{
}
s
F
(
s
)
sf
(
0
)
f
dt 2
ii.
Integration Theorem:
t
F ( s)
L f ( )d
s
0
iii.
Initial Value Theorem:
f (0) lim sF ( s )
iv.
Final Value Theorem:
lim f (t ) lim sF ( s )
t
t
s 0
THE LAPLACE TRANSFORM
The inverse Laplace Transform can be obtained using:
j
1
st
f (t )
F
(
s
)
e
ds
2j j
Partial fraction method can be used to find the inverse Laplace
Transform of a complicated function.
We can convert the function to a sum of simpler terms for which we
know the inverse Laplace Transform.
F (s) F1 (s) F2 (s) Fn (s)
f (t ) L1 F1 ( s) L1 F2 ( s ) L1 Fn ( s)
f1 (t ) f 2 (t ) f n (t )
THE LAPLACE TRANSFORM
We will consider three cases and show that F(s) can be
expanded into partial fraction:
i.
Case 1:
Roots of denominator A(s) are real and distinct.
ii.
Case 2:
Roots of denominator A(s) are real and repeated.
iii. Case 3:
Roots of denominator A(s) are complex conjugate.
THE LAPLACE TRANSFORM
Case 1: Roots of denominator A(s) are real and distinct.
Example:
F ( s)
2
( s 1)( s 2)
Solution:
A
B
F (s)
s 1 s 2
2
2
s 1 s 2
f (t ) 2e t 2e 2t
It is found that:
A = 2 and B = -2
THE LAPLACE TRANSFORM
Case 1: Roots of denominator A(s) are real and distinct.
Problem: Find the Inverse Laplace Transform for the following.
F ( s)
s3
( s 1)( s 2)
THE LAPLACE TRANSFORM
Case 2: Roots of denominator A(s) are real and repeated.
Example:
2
F ( s)
( s 1)( s 2) 2
Solution:
A
B
C
F ( s)
s 1 s 2 ( s 2) 2
2
2
2
s 1 s 2 ( s 2) 2
f (t ) 2e t 2e 2t 2te2t
It is found that:
A = 2, B = -2 and C = -2
THE LAPLACE TRANSFORM
Case 3: Roots of denominator A(s) are complex conjugate.
Example:
F ( s)
3
s( s 2 2s 5)
Solution:
A
Bs C
F ( s) 2
s s 2s 5
3 5 3 s2
2
s 5 s 2s 5
3 5 3 ( s 1) (1 2)( 2)
s 5 ( s 1) 2 2 2
It is found that:
A = 3/5, B = -3/5
and C = -6/5
THE LAPLACE TRANSFORM
Case 3: Roots of denominator A(s) are complex conjugate.
Example:
F ( s)
3
s( s 2 2s 5)
Solution:
3 3 t
1
f (t ) e (cos 2t sin 2t )
5 5
2
THE LAPLACE TRANSFORM
Problem: Find the solution x(t) for the following differential
equations.
i.
x 3x 2 x 0,
x(0) a, x (0) b
ii.
x 2 x 5 x 3,
x(0) a, x (0) b
THE TRANSFER FUNCTION
The transfer function of a linear system is the ratio of the Laplace
Transform of the output to the Laplace Transform of the input
variable.
Output ( s)
G( s)
Input ( s)
Consider a spring-mass-damper dynamic equation with initial zero
condition.
Ms 2Y (s) bsY (s) kY (s) R( s)
THE TRANSFER FUNCTION
R(s)
1
Ms 2 bs k
Y(s)
The transfer function is given by the following.
G( s)
Y ( s)
1
R( s) Ms 2 bs k
THE TRANSFER FUNCTION
Electrical Network Transfer Function
Component
V-I
I-V
V-Q
Impedance
Admittance
THE TRANSFER FUNCTION
Problem: Obtain the transfer function for the following RC network.
THE TRANSFER FUNCTION
Problem: Obtain the transfer function for the following RLC network.
Answer:
THE TRANSFER FUNCTION
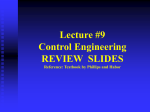
Op-Amp Circuit Transfer Function
Frequently used to amplify signal in
sensor circuits.
e1 and e2 are relative to ground.
e1 to the -ve terminal of the amplifier is
inverted, and e2 to the +ve terminal.
The total input to the amplifier is e2-e1. So, we have:
e0 K (e2 e1 )
The operating conditions for ideal op-amp:
i.
ii.
i1 = i2 = 0 (∞ input impedance)
e1 = e2
THE TRANSFER FUNCTION
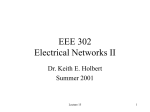
Inverting Amplifier
e1 e' e'eo
R1
R2
Assuming ideal condition,
e' 0
The transfer function for the circuit above is obtained as:
e0
R2
e1
R1
Problem: Find the transfer function for a non-inverting amplifier.
THE TRANSFER FUNCTION
Mechanical System Transfer Function
The external force u(t) is the input to the system,
and the displacement y(t) of the mass is the output.
The displacement y(t) is measured from the
equilibrium position.
The transfer function of the system.
my by ky u (t )
Problem: Find the transfer function for the mechanical system below.
BLOCK DIAGRAM
A block diagram of a system is a practical representation of the
functions performed by each component and of the flow of signals.
Input
Cascaded sub-systems:
Transfer Function
G(s)
Output
BLOCK DIAGRAM
Feedback Control System
BLOCK DIAGRAM
Feedback Control System
The negative feedback of
the control system is given
by:
Ea(s) = R(s) – H(s)Y(s)
Y(s) = G(s)Ea(s)
Therefore,
Y ( s) G ( s)[ R( s) H ( s)Y ( s)]
Y ( s)
G( s)
R( s ) 1 G ( s ) H ( s )
BLOCK DIAGRAM
Reduction Rules
BLOCK DIAGRAM
Reduction Rules
BLOCK DIAGRAM
Problem:
BLOCK DIAGRAM
Problem:
FURTHER READING…
Chapter 2
i.
ii.
Dorf R.C., Bishop R.H. (2001). Modern Control Systems (9th Ed),
Prentice Hall.
Nise N.S. (2004). Control System Engineering (4th Ed), John
Wiley & Sons.
“The whole of science is nothing more than a refinement of
everyday thinking…”
THE END…