Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
THE Scaling of Micromechanical Devices [1]
To design micromechanical actuators, it is helpful to understand how forces scale. A
simple notation for understanding multiple force laws and equations is described below.
This notation is used to describe how different forces scale into the small (and large)
domain.
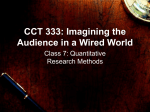
This paper uses a matrix formalism to describe the scaling laws. This nomenclature
shows a number of different force laws in a single equation. In this notation, the size of
the system is represented by a single scale variable, S, which represents the linear scale of
the system. The choice of S for a system is a bit arbitrary. The S could be the separation
between the plates of a capacitor, or it could be the length of one edge of the capacitor.
Once chosen, however, it is assumed that all dimensions of the system are equally scaled
down in size as S is decreased (isometric scaling). For example, nominally S = 1; if S is
then changed to 0.1, all the dimensions of the system are decreased by a factor of ten. A
number of different cases are shown in one equation.
For example
shows four cases for the force law. The top force law scales as S, next scales as S squared
or S2, the next as S3, and the bottom as S4. The scaling of the time required to move an
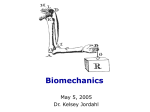
object using these forces is given as:
The top element in equation 2 is S1.5. This is how the time scales when the force scales as
S1. The second element shows that t scales as S1 when the force scales as S2. The third
and forth element show how the time scales when the force scales as S3 and S4
respectively.
This notation is used consistently throughout this paper. A dash [—] means that this case
does not apply.
This vertical bracket notation can be used for other scaling laws. For example, if one had
a desire the top element could refer to the case where the force scales as S6.Or the top
element could represent to the case where the acceleration scales as S1, and the second
element represent the case where the acceleration scales as S2 , ... . These vertical
brackets can be defined for the convenience of the problem at hand. All that is needed is
the initial definition of what each element represents. (Equation 1 is this definition in our
present case.)
Magnetic Forces
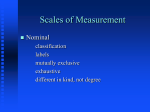
This Section examines the scaling of magnetic forces caused by the interactions of
electrical currents. Three cases are examined: A) constant temperature rise from the
center to the exterior of the coil windings, B) constant heat flow per unit surface area of
the coil windings, and C) constant electrical current density in the coil windings.
Assumption A) leads to forces that scale as S2, assumption B) leads to forces that scale as
S3, and assumption C) leads to forces that scale as S4. These three cases are depicted in
equation 2.5. The derivation of this force scaling requires a bit of math and will not be
given here. This derivation is given in the appendix of “Microrobots and
Micromechanical Systems.”
The above force scaling is for the case of two electrical currents interacting. As S
decreases, these forces decrease because it is difficult to generate large magnetic fields
with small coils of wire (electromagnets). However permanent magnets maintain their
strength as they are scaled down in size, and it is often advantageous to design magnetic
systems that use the interaction between an electromagnet and a permanent magnet. In
the discussion below the scaling between two electromagnets will be given in square
brackets [ Sn ], and the scaling between a permanent magnet and an electromagnet will be
given in curly brackets { Sn }.
Case C) Here the current density J is assumed to be constant or J = S 0, and hence a wire
with one tenth the area carries one tenth the current. The heat generated per volume of
windings is constant for this case. The force generated for this constant current case
scales as [ S4 ] { S3 }, i e., when the system decreases by a factor of ten in size, the force
generated by two interacting electromagnets decreases by (1 / 10)4, or a factor of ten
thousand. Clearly this is not a strong micro force. (However, on the galactic scale,
magnetic forces become truly impressive. Looking at the spiral arms of the S and SB
galaxies, I wonder how these large magnetic fields effect the complex twisting of galactic
matter.)
Case B) Since heat can be more easily conducted out of a small volume, it is possible to
run isolated small motors with higher current densities than assumed above. However,
increasing the current density makes the motors much less efficient. (Note, electronics is
usually much more wasteful of power than the micromechanical components, and the
power used by the motor is often insignificant.) If the heat flow per unit surface area of
the windings is constant, the current density in the wires scales as J = S-0.5 This increase
in current density for small systems increases the force generated, and the force scales as
[ S3 ] { S2.5 } .
Case A) A third possible constraint on the magnetic system as it is scaled down is the
maximum temperature the wire and insulation can withstand. If the system parameters
are scaled so that there is a constant temperature difference between the windings and
surrounding environment, then the current density scales as J = ( S-1 ) and the force scales
as [ S2 ] { S2 } As will be discussed later, forces that scale as ( S2 ) are useful in small
systems. Hence in many micro designs, it may be advantageous to use the aggressive
increase in current density assumed in case A.
In summary, the currents required for the different force laws scale as:
These current scaling are the result of the assumptions in Case A, Case B, and Case C)
and
generate
the
forces:
In designing micro electromagnets, one must also consider electromigration. At high
current densities, tiny wires are deformed by the current and the wire can break. For
example thin aluminum interconnects at current densities higher than 5 x 105 A/ cm2
show the development of voids and hillocks which can lead to coil failure. The
temperature, composition and length of time the conductor is used have a large effect on
the electromigration. (References: [1] A.Scorzoni et al., "Non-Linear Resistance
Behavior in the Early Stages and After Electromigration in Al-Si lines", J. Appl. Phys.,
80 (1), p.143 (1996). and [2] A.Scorzoni, I.De Munari and H. Stulens, "Non-Destructive
Electrical Techniques as Means for Understanding the Basic Mechanisms of
Electromigration", MRS Symposia Proceedings, Vol.337, pp.515--526 (1994).)
Electrostatic forces
Electrostatic actuators have a distinguished history, but are not in general use for motors.
Electrostatic forces, however, become significant in the micro domain and have
numerous potential applications. The exact form of the scaling of electrostatic forces
depends upon how the E field changes with size. Generally, the breakdown E field of
insulators increases as the system becomes smaller. Two cases will be examined here: (1)
constant E field ( E= S0 ); and (2) an E field that increases slightly as the system becomes
smaller (E = S-0.5 ). This second case exemplifies the increasing E fields one can use as
the system is scaled down.
(An early paper by Paschen discusses the increase in the breakdown E field as a gap
becomes smaller. F. Paschen, Uber die zum Funkenubergang in Luft, Wasserstoff and
Kohlensaure bei verschiedenen Drucken erforderliche Potentialdifferenz. Annalen der
Physick, 37:69-96, 1889. Also Marc Madou's book "Fundamentals of Microfabrication"
has a description and plot of Paschen's curve on page 59.)
For the constant electric field ( E = S0 ) the force scales as S2 When E scales as S-0.5 ,
then the force has the even better scaling of F = S1 . When the size of the system is
decreased, both of these force laws give increasing accelerations and smaller transit
times.
Other forces
There are several other interesting forces. Biological forces from muscle are proportional
to the cross section of the muscle, and scale as S2 Pneumatic and hydraulic forces are
caused by pressures (P) and also scale as S2. Large forces can be generated in the micro
domain using pressure related forces. Surface tension has an absolutely delightful scaling
of S1, because it depends upon the length of the interface.
The unit cube
Below is a discussion of how the above force laws affect the acceleration, transit time,
power generation and power dissipation as one scales to smaller domains. In going from
here to there as quickly as possible with a certain force, one wants to accelerate for half
the distance, and then decelerate. The mass of the object scales as S3 (density is assumed
to be intensive, or to not change with scale). Now the acceleration is given by equations
of dynamics as:
and
the
transit
time
is:
where SF represents the scaling of the force F. Here only the time to accelerate has been
calculated, but an equal time is needed to decelerate, and both these times scale in the
same way. For the forces given in equation (1), the accelerations and transit times can be
expressed as
and
Even in the worst case, where F = S4 (the bottom element), the time required to perform a
task remains constant, t = S0 , when the system is scaled down. Under more favorable
force scaling, for example, the F = S2 scaling case, the time required decreases as t = S1
with the scale. A system ten times smaller can perform an operation ten times faster. This
is an observation that we know intuitively: small things tend to be quick.
Inertial forces tend to become insignificant in the small domain, and in many cases
kinematics may replace dynamics. This will probably lead to interesting new control
strategies.
Power generated and dissipated
As the scale of a system is changed, one wants to know how the power produced depends
upon the force laws. For example, consider the unit cube above, which is first accelerated
and then decelerated. The power, P, or the work done on the object per unit time is
The scaling of each of the terms on the right is known.
The power that can be produced per unit volume ( V= S3 ) is
When the force scales as S2 then the power per unit volume scales as S-1 . For example,
when the scale decreases by a factor of ten, the power that can be generated per unit
volume increases by a factor of ten. For force laws with a higher power than S2, the
power generated per volume degrades as the scale size decreases. There are several
attractive force laws that behave as S2, and one should try to use these forces when
designing small systems.
For the magnetic case, one may be concerned about the power dissipated by the resistive
loss of the wires. The power due to this resistive loss, PR, is
where A is the cross section of the wire, (rho) is the resistivity of the wire, and L is the
length
of
the
wire.
This
gives
where (A L) is the volume. The resistivity scales as S0 and the volume scales as S3 and
from equation (3) above,
Hence the power dissipated scales as:
and the power per unit volume is:
For the magnetic case A) where force scales as S2, the power that must be dissipated per
unit volume scales as S-2, or, when the scale is decreased by a factor of ten, a hundred
times as much power must be dissipated within a set volume. This magnetic case is bad if
one is concerned about power density or the amount of cooling needed. If power
dissipation or cooling are not a critical concern, then this scaling case produces more
substantial forces. In the future, superconductors may give us stronger micro
electromagnets.
Summary of the scaling results
The force has been found to scale in one of four different ways: [ S1 ] , [ S2 ] , [ S3 ] , and
[ S4 ] . If the scale size is decreased by a factor of ten, the forces for these different laws
decrease by ten, one hundred, one thousand, and ten thousand respectively. In most cases,
one wants to work with force laws that behave as [ S1 ] or [ S2 ] . The different cases that
lead to these force laws, the accelerations, the transit times, and the power generated per
unit volume are given below.
and
For the force laws that behave as [ S1 ] or [ S2 ] , the acceleration increases as one scales
down the system. The power that can be produced per unit volume also increases for
these two laws. The surface tension scales advantageously, [ S1 ] , however, it is not clear
how to use this force in most applications. Biological forces also scale well, [ S2 ] but
may be difficult to implement. Electrostatic and pressure related forces appear to be quite
useful forces in the small domain.
Reference
This material is adapted from the article “Microrobots and Micromechanical Systems” by
W. S. N. Trimmer, Sensors and Actuators, Volume 19, Number 3, September 1989,
pages 267 - 287, and other sources. The book "Micromechanics and MEMS" has this
and other interesting articles on small mechanical systems; published by the IEEE Press,
number PC4390, ISBN 0-7803-1085-3. A more detailed analysis of the scaling of
electromagnetic forces is given in the Appendix to “Microrobots and Micromechanical
Systems.”
A nice description of scaling is given in “Trimmer’s Vertical Bracket Notation” in the
book “Fundamentals of Microfabrication” by Marc Madou, ISBN 0-8493-9451-1, CRC
Press 1997.