

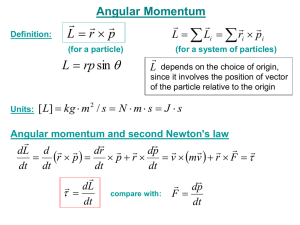
Chapter 8 Rotational Dynamics continued
... ω : angular velocity of rotation (same for entire object) α : angular acceleration (same for entire object) vT = ω r : tangential velocity aT = α r : tangential acceleration According to Newton’s second law, a net force causes an object to have a linear acceleration. What causes an object to have an ...
... ω : angular velocity of rotation (same for entire object) α : angular acceleration (same for entire object) vT = ω r : tangential velocity aT = α r : tangential acceleration According to Newton’s second law, a net force causes an object to have a linear acceleration. What causes an object to have an ...

Conceptual Physics
... Centrifugal force is an effect of rotation. It is not part of an interaction and therefore it cannot be a true force. For this reason, physicists refer to centrifugal force as a fictitious force, unlike gravitational, electromagnetic, and nuclear forces. Nevertheless, to observers who are in a rotat ...
... Centrifugal force is an effect of rotation. It is not part of an interaction and therefore it cannot be a true force. For this reason, physicists refer to centrifugal force as a fictitious force, unlike gravitational, electromagnetic, and nuclear forces. Nevertheless, to observers who are in a rotat ...

Chapter 9. Center of Mass and Linear Momentum
... • If the kinetic energy of the system is conserved, such a collision is called an elastic collision. • If the kinetic energy of the system is not conserved, such a collision is called an inelastic collision. • The inelastic collision of two bodies always involves a loss in the kinetic energy of the ...
... • If the kinetic energy of the system is conserved, such a collision is called an elastic collision. • If the kinetic energy of the system is not conserved, such a collision is called an inelastic collision. • The inelastic collision of two bodies always involves a loss in the kinetic energy of the ...
lecture23
... first as in (a) and then as in (b). In which case does the dumbbell acquire the greater center-of-mass speed? 1) case (a) 2) case (b) 3) no difference 4) It depends on the rotational inertia of the dumbbell. In which case does the dumbbell acquire the greater energy? Example: A spherical shell rotat ...
... first as in (a) and then as in (b). In which case does the dumbbell acquire the greater center-of-mass speed? 1) case (a) 2) case (b) 3) no difference 4) It depends on the rotational inertia of the dumbbell. In which case does the dumbbell acquire the greater energy? Example: A spherical shell rotat ...


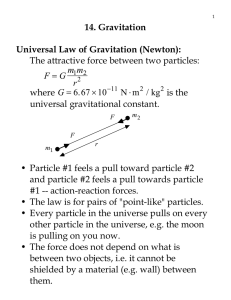
14. Gravitation Universal Law of Gravitation (Newton): G
... Calculate the gravitational force due to a hollowed sphere, assuming that the mass of the ...
... Calculate the gravitational force due to a hollowed sphere, assuming that the mass of the ...
F - Purdue Physics
... that the existence of the Fk component means that there MUST be relative motion between the belt and the box at the instant shown. So the box is moving slower than the belt at this instant. The box’s “inertia” is NOT sufficient to keep it moving slower than the belt (or standing still) – that would ...
... that the existence of the Fk component means that there MUST be relative motion between the belt and the box at the instant shown. So the box is moving slower than the belt at this instant. The box’s “inertia” is NOT sufficient to keep it moving slower than the belt (or standing still) – that would ...


POSITION-TIME GRAPHS WORKSHEET #2
... estimate the mass of the cart and the force of kinetic friction. (Hint: When is the acceleration zero, even though force is being applied). (c) It is a level ground, estimate the coefficient of kinetic friction. (d) give an equation that determines the relation between the two variables, be sure to ...
... estimate the mass of the cart and the force of kinetic friction. (Hint: When is the acceleration zero, even though force is being applied). (c) It is a level ground, estimate the coefficient of kinetic friction. (d) give an equation that determines the relation between the two variables, be sure to ...

Powerpoint
... • Every part of the Earth is attracted to the Moon due to gravity • One side of Earth is closer to the Moon than the other side of the Earth is. The closer side is more strongly attracted towards the Moon than the more distant side is • The Earth is being stretched by the difference in the gravitati ...
... • Every part of the Earth is attracted to the Moon due to gravity • One side of Earth is closer to the Moon than the other side of the Earth is. The closer side is more strongly attracted towards the Moon than the more distant side is • The Earth is being stretched by the difference in the gravitati ...



Chapter 8
... freely from two different pivots The intersection of the lines indicates the center of gravity A rigid object can be balanced by a single force equal in magnitude to its weight as long as the force is acting upward through the object’s center of gravity ...
... freely from two different pivots The intersection of the lines indicates the center of gravity A rigid object can be balanced by a single force equal in magnitude to its weight as long as the force is acting upward through the object’s center of gravity ...


Work and Kinetic Energy
... Q19) A block is attached to the end of an ideal spring and moved from coordinate xi to coordinate xf . The relaxed position is at x = 0. The work done by spring is positive if: 1) xi = 2cm and xf = 4cm 2) xi = -2 cm and xf = 4cm 3) xi = -2 cm and xf = -4 cm 4) xi = 2 cm and xf = -4 cm 5) xi = -4 cm ...
... Q19) A block is attached to the end of an ideal spring and moved from coordinate xi to coordinate xf . The relaxed position is at x = 0. The work done by spring is positive if: 1) xi = 2cm and xf = 4cm 2) xi = -2 cm and xf = 4cm 3) xi = -2 cm and xf = -4 cm 4) xi = 2 cm and xf = -4 cm 5) xi = -4 cm ...

The Age of Einstein
... In 1905, Einstein published three great papers in unrelated areas of Physics. In this chapter, we shall discuss his new ideas concerning the relative motion of beams of light, and of objects that move at speeds close to that of light. His independent investigations were based upon just two postulate ...
... In 1905, Einstein published three great papers in unrelated areas of Physics. In this chapter, we shall discuss his new ideas concerning the relative motion of beams of light, and of objects that move at speeds close to that of light. His independent investigations were based upon just two postulate ...


Work, Energy and Momentum
... In the case of gravitational potential energy and elastic potential energy, we have seen that, the work done is independent of the path followed by the body and depends only upon the initial and final position. In both case the total mechanical energy remains constant and the force required for work ...
... In the case of gravitational potential energy and elastic potential energy, we have seen that, the work done is independent of the path followed by the body and depends only upon the initial and final position. In both case the total mechanical energy remains constant and the force required for work ...




Geography 04b
... In our previous discussion of planetary motion around the Sun, instead of saying that the centripetal force is the gravitational force, as we did when we derived eq. (4.4), we could have obtained the same result by using the following reasoning: When a planet revolves around the Sun, there are two f ...
... In our previous discussion of planetary motion around the Sun, instead of saying that the centripetal force is the gravitational force, as we did when we derived eq. (4.4), we could have obtained the same result by using the following reasoning: When a planet revolves around the Sun, there are two f ...

Document
... Equivalently, only the perpendicular distance between the line of force and the axis of rotation, known as the moment arm r, can be used to calculate the torque. t = rF = (rsinq)F ...
... Equivalently, only the perpendicular distance between the line of force and the axis of rotation, known as the moment arm r, can be used to calculate the torque. t = rF = (rsinq)F ...