
Study Guide Chapter 11
... The main point is to understand the equation of a plane (in three dimensions). In general it is ax+ by+cz = d. Specific examples are 22 4y z = 14 and 22 4y z = 0. Those planes are parallel. They have the same normal vector N = (2,4,1). The equations of the planes can be written as N P = d. A typical ...
... The main point is to understand the equation of a plane (in three dimensions). In general it is ax+ by+cz = d. Specific examples are 22 4y z = 14 and 22 4y z = 0. Those planes are parallel. They have the same normal vector N = (2,4,1). The equations of the planes can be written as N P = d. A typical ...




matrix equation
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...

Slide 1.4
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...

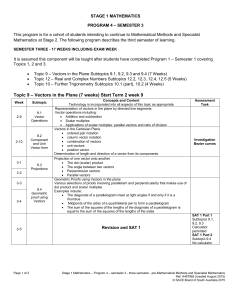
Example Problem - Resolving a Velocity Vector into Its Components
... Usually there is friction between the inclined plane and the object on it. The resolution of weight on an inclined plane can be used to measure the force of friction or the coefficient of static friction between the two surfaces. Put a coin on one of your textbooks. Now slowly lift the cover. The co ...
... Usually there is friction between the inclined plane and the object on it. The resolution of weight on an inclined plane can be used to measure the force of friction or the coefficient of static friction between the two surfaces. Put a coin on one of your textbooks. Now slowly lift the cover. The co ...

Slide 1.4
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...
... Likewise, the third entry in Ax can be calculated from the third row of A and the entries in x. If the product Ax is defined, then the ith entry in Ax is the sum of the products of corresponding entries from row i of A and from the vertex x. The matrix with 1s on the diagonal and 0s elsewhere ...