
Chapter 2 : Matrices
... so that A(u − v) = Au − Av = b − b = 0, where 0 is the zero m × 1 matrix. It now follows that for every c ∈ R, we have A(u + c(u − v)) = Au + A(c(u − v)) = Au + c(A(u − v)) = b + c0 = b, so that x = u + c(u − v) is a solution for every c ∈ R. Clearly we have infinitely many solutions. ...
... so that A(u − v) = Au − Av = b − b = 0, where 0 is the zero m × 1 matrix. It now follows that for every c ∈ R, we have A(u + c(u − v)) = Au + A(c(u − v)) = Au + c(A(u − v)) = b + c0 = b, so that x = u + c(u − v) is a solution for every c ∈ R. Clearly we have infinitely many solutions. ...

linear mappings
... 2.1. Definitions and examples. ............................................................... 64 2.2. Canonical form of a quadratic form. ............................................... 65 2.3. Lagrange’s Method. ......................................................................... 66 2.4. Jaco ...
... 2.1. Definitions and examples. ............................................................... 64 2.2. Canonical form of a quadratic form. ............................................... 65 2.3. Lagrange’s Method. ......................................................................... 66 2.4. Jaco ...
4 Singular Value Decomposition (SVD)
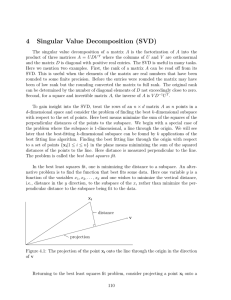
... Here we mention two examples. First, the rank of a matrix A can be read off from its SVD. This is useful when the elements of the matrix are real numbers that have been rounded to some finite precision. Before the entries were rounded the matrix may have been of low rank but the rounding converted th ...
... Here we mention two examples. First, the rank of a matrix A can be read off from its SVD. This is useful when the elements of the matrix are real numbers that have been rounded to some finite precision. Before the entries were rounded the matrix may have been of low rank but the rounding converted th ...
Linear Algebra and Introduction to MATLAB
... – numerical solutions of differential equations – graphics in 2-D and 3-D including colors and animation – and a lot of other applications We will work through some of the applications listed above. There is a variety of toolboxes which are implemented in MATLAB to solve special classes of problems. ...
... – numerical solutions of differential equations – graphics in 2-D and 3-D including colors and animation – and a lot of other applications We will work through some of the applications listed above. There is a variety of toolboxes which are implemented in MATLAB to solve special classes of problems. ...

S.M. Rump. On P-Matrices. Linear Algebra and its Applications
... In this paper we will present characterizations of P -matrices related to the sign-real spectral radius, and based on that some necessary conditions and sufficient conditions. In case A ∈ / P we also derive strategies to find a nonpositive minor. Finally, we give an algorithm which is not a priori e ...
... In this paper we will present characterizations of P -matrices related to the sign-real spectral radius, and based on that some necessary conditions and sufficient conditions. In case A ∈ / P we also derive strategies to find a nonpositive minor. Finally, we give an algorithm which is not a priori e ...
Hua`s Matrix Equality and Schur Complements - NSUWorks
... contractive: a matrix A is said to be contractive whenever I − A∗ A is nonnegative definite, namely the eigenvalues of A∗ A (i.e., the singular values of A) all lie in the closed unit interval [0, 1]. Horn & Johnson [13, p. 46] call such matrices A contractions; see also Bhatia [2, p. 7]. When I − A ...
... contractive: a matrix A is said to be contractive whenever I − A∗ A is nonnegative definite, namely the eigenvalues of A∗ A (i.e., the singular values of A) all lie in the closed unit interval [0, 1]. Horn & Johnson [13, p. 46] call such matrices A contractions; see also Bhatia [2, p. 7]. When I − A ...


Reciprocal Cost Allocations for Many Support Departments Using
... the reciprocated costs as unknown variables A, B, C, D and E, and the 5x1 |K| matrix represents the individual cost of each department. Each value within a matrix may be identified by its row and column; for example, (s1,2) is equal to -0.20 of the |S| matrix at row 1 and column 2. An array of numbe ...
... the reciprocated costs as unknown variables A, B, C, D and E, and the 5x1 |K| matrix represents the individual cost of each department. Each value within a matrix may be identified by its row and column; for example, (s1,2) is equal to -0.20 of the |S| matrix at row 1 and column 2. An array of numbe ...




Ill--Posed Inverse Problems in Image Processing
... Linear and spatially invariant blurring operator A is fully described by its action on one SPI, i.e. by one PSF. (Which one?) Recall: Up to now the width and height of both the SPI and PSF images have been equal to some k, called the window size. For correctness the window size must be properly chos ...
... Linear and spatially invariant blurring operator A is fully described by its action on one SPI, i.e. by one PSF. (Which one?) Recall: Up to now the width and height of both the SPI and PSF images have been equal to some k, called the window size. For correctness the window size must be properly chos ...



Coloring Random 3-Colorable Graphs with Non
... say that an algorithm succeeds with high probability (w. h. p.) if its failure probability tends to zero as the input size tends to infinity.) There are several models for random k-colorable graphs, all of which have the property in common, that every possible edge (i. e., every pair of differently co ...
... say that an algorithm succeeds with high probability (w. h. p.) if its failure probability tends to zero as the input size tends to infinity.) There are several models for random k-colorable graphs, all of which have the property in common, that every possible edge (i. e., every pair of differently co ...


A refinement-based approach to computational algebra in Coq⋆
... algorithm described on high-level data structures. Then, we implement it on data structures that are closer to machine representations, once we no longer need rich theory to prove the correctness. Thus the implementation is an immediate translation of the algorithm, see Fig. 1. However, in our appro ...
... algorithm described on high-level data structures. Then, we implement it on data structures that are closer to machine representations, once we no longer need rich theory to prove the correctness. Thus the implementation is an immediate translation of the algorithm, see Fig. 1. However, in our appro ...

On Approximate Robust Counterparts of Uncertain Semidefinite and
... in variables x, {λ` ∈ R}M `=1 , {Y` ∈ S }`=M +1 . Consequently, (AR[ρ]) is equivalent to the semidefinite program of minimizing the objective f T x under the constraints (11). Note that the resulting problem (A[ρ]) is typically much better suited for numerical processing than (AR[ρ]). Indeed, the fi ...
... in variables x, {λ` ∈ R}M `=1 , {Y` ∈ S }`=M +1 . Consequently, (AR[ρ]) is equivalent to the semidefinite program of minimizing the objective f T x under the constraints (11). Note that the resulting problem (A[ρ]) is typically much better suited for numerical processing than (AR[ρ]). Indeed, the fi ...

Linear spaces and linear maps Linear algebra is about linear
... Geometry of eigenvectors: Recall that a vector v in R3 say, has both a length and (if v ≠ 0) a direction. An eigenvector is a non zero vector v such that either f(v) = 0, or v and f(v) have the same or opposite direction. Hence v spans a line that is mapped by f into itself. Eigenvectors and diagona ...
... Geometry of eigenvectors: Recall that a vector v in R3 say, has both a length and (if v ≠ 0) a direction. An eigenvector is a non zero vector v such that either f(v) = 0, or v and f(v) have the same or opposite direction. Hence v spans a line that is mapped by f into itself. Eigenvectors and diagona ...

