
6. Discrete I/O - Philadelphia University Jordan
... Output interface circuitry switches the supplied voltage from the PLC ON or OFF according to the status of the corresponding bit in the output image table. ...
... Output interface circuitry switches the supplied voltage from the PLC ON or OFF according to the status of the corresponding bit in the output image table. ...

Vinf
... continuos form, (d) discrete form. In case of the output term with fuzzy singleton, the max composition is represented in figure 3. This approach is referred to TSK fuzzy inference method as mentioned before. It only uses five fuzzy singleton terms that could be determined by the designer. It is use ...
... continuos form, (d) discrete form. In case of the output term with fuzzy singleton, the max composition is represented in figure 3. This approach is referred to TSK fuzzy inference method as mentioned before. It only uses five fuzzy singleton terms that could be determined by the designer. It is use ...





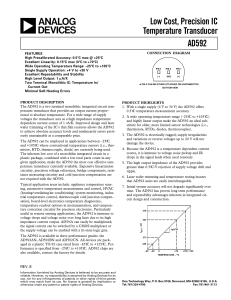
Data Sheet
... The GPD Series laser modules are designed exclusively to host green laser diodes that do not have their own internal photodiode. The GPD overcomes this challenge by integrating an internal photodiode after a collimating lens. This configuration allows for Automatic Power Control (APC) mode of operat ...
... The GPD Series laser modules are designed exclusively to host green laser diodes that do not have their own internal photodiode. The GPD overcomes this challenge by integrating an internal photodiode after a collimating lens. This configuration allows for Automatic Power Control (APC) mode of operat ...


Document
... The rightmost amplifier, along with the resistors labelled and is just the standard differential amplifier circuit, with gain = and differential input resistance = 2· . The two amplifiers on the left are the buffers. With removed (open circuited), they are simple unity gain buffers; the circuit wil ...
... The rightmost amplifier, along with the resistors labelled and is just the standard differential amplifier circuit, with gain = and differential input resistance = 2· . The two amplifiers on the left are the buffers. With removed (open circuited), they are simple unity gain buffers; the circuit wil ...

III. Component Selection and Radiation Testing
... A prototype of the CCM module has been built and was used in a Test Beam at CERN in July of 2002. The CCM was able to successfully communicate with the Main Control system using the custom control software. Communication with all the FE boards within a RBX was successful along with monitoring of the ...
... A prototype of the CCM module has been built and was used in a Test Beam at CERN in July of 2002. The CCM was able to successfully communicate with the Main Control system using the custom control software. Communication with all the FE boards within a RBX was successful along with monitoring of the ...


FIN1531 5V LVDS 4-Bit High Speed Differential Driver FI N1531 5V
... 5V LVDS 4-Bit High Speed Differential Driver General Description This quad driver is designed for high speed interconnects utilizing Low Voltage Differential Signaling (LVDS) technology. The driver translates 5V TTL/CMOS signal levels to LVDS levels with a typical differential output swing of 350 mV ...
... 5V LVDS 4-Bit High Speed Differential Driver General Description This quad driver is designed for high speed interconnects utilizing Low Voltage Differential Signaling (LVDS) technology. The driver translates 5V TTL/CMOS signal levels to LVDS levels with a typical differential output swing of 350 mV ...

High-Performance Wafer Handling Systems for Semiconductor
... to move in arbitrarily situated straight-lines in the Cartesian space, which in turn have to be appropriately blended with the “gross” motions, usually defined in the cylindrical space. The conventional “radial-robots”, also called “TRZ-robots” by the names of the participating axes, became deficien ...
... to move in arbitrarily situated straight-lines in the Cartesian space, which in turn have to be appropriately blended with the “gross” motions, usually defined in the cylindrical space. The conventional “radial-robots”, also called “TRZ-robots” by the names of the participating axes, became deficien ...


ECE 85L Digital Logic Design Laboratory Fresno State, Lyles
... Thunderbird. Since your system will require a clock frequency of approximately 1 Hz, you must design an astable multivibrator with the appropriate frequency using a 555 CounterTimer chip in advance of the Synchronous State Machine design. Because the 555 timer is not capable of driving a large fan-o ...
... Thunderbird. Since your system will require a clock frequency of approximately 1 Hz, you must design an astable multivibrator with the appropriate frequency using a 555 CounterTimer chip in advance of the Synchronous State Machine design. Because the 555 timer is not capable of driving a large fan-o ...


EMAC single board controller interfaceing guidelines.
... have seen this when switching a light switch, you will see and hear it arching for a short period of time until it settles. For example if we have a switch with a pull-up resistor connected as described above, when the switch is flipped to the on position it will initially bounce between high and lo ...
... have seen this when switching a light switch, you will see and hear it arching for a short period of time until it settles. For example if we have a switch with a pull-up resistor connected as described above, when the switch is flipped to the on position it will initially bounce between high and lo ...



isscc2000 sessions
... Voltage CMOS (SA-Vt CMOS) Pd=320-380mW with VDD=1.5V-1.8V and f=220MHz 4.3M transistors, 0.2u process, standby current 30uA ...
... Voltage CMOS (SA-Vt CMOS) Pd=320-380mW with VDD=1.5V-1.8V and f=220MHz 4.3M transistors, 0.2u process, standby current 30uA ...

Data Acquisition Electronics Unit – Lecture 6
... Magnetoresistive devices – for lower field strengths can sense small fractions of a gauss (used in electronic compasses) ...
... Magnetoresistive devices – for lower field strengths can sense small fractions of a gauss (used in electronic compasses) ...

Interfacing with UltraVolt High Voltage Power Supplies Models A, AA
... Pin 4 – Enable/Disable: The enable function is the same for all models. A HIGH signal enables and a LOW signal disables the output. If pin 4 is left open, the power supply defaults to an enabled state. Pin 5 – Signal Ground Return: The signal ground should be used as the reference point for both th ...
... Pin 4 – Enable/Disable: The enable function is the same for all models. A HIGH signal enables and a LOW signal disables the output. If pin 4 is left open, the power supply defaults to an enabled state. Pin 5 – Signal Ground Return: The signal ground should be used as the reference point for both th ...
Control system

A control system is a device, or set of devices, that manages, commands, directs or regulates the behavior of other devices or systems. Industrial control systems are used in industrial production for controlling equipment or machines.There are two common classes of control systems, open loop control systems and closed loop control systems. In open loop control systems output is generated based on inputs. In closed loop control systems current output is taken into consideration and corrections are made based on feedback. A closed loop system is also called a feedback control system. The human body is a classic example of feedback systems.