
Algebraic Structures
... Algebras An algebra A is a module over a ring R with identity together with an internal associative operation, usually called multiplication, such that 1. A is a ring. ...
... Algebras An algebra A is a module over a ring R with identity together with an internal associative operation, usually called multiplication, such that 1. A is a ring. ...





Complex Numbers
... - Cartesian equation of a sphere. - Relative positions of a point and sphere; of a plane and sphere ; of a - Volume and surface area of the sphere. ...
... - Cartesian equation of a sphere. - Relative positions of a point and sphere; of a plane and sphere ; of a - Volume and surface area of the sphere. ...
CHAPTER 7
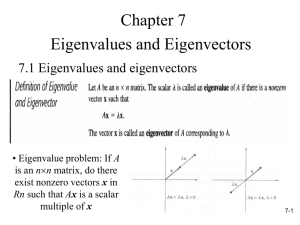
... • Eigenvalues and eigenvectors of linear transformations: A number is called an eigenvalue of a linear tra nsformatio n T : V V if there is a nonzero vector x such that T (x) x. The vector x is called an eigenvecto r of T correspond ing to , and the setof all eigenvecto rs of (with the z ...
... • Eigenvalues and eigenvectors of linear transformations: A number is called an eigenvalue of a linear tra nsformatio n T : V V if there is a nonzero vector x such that T (x) x. The vector x is called an eigenvecto r of T correspond ing to , and the setof all eigenvecto rs of (with the z ...

Curriculum Sequence: Pre
... N‐VM.2. (+) Find the components of a vector by subtracting the coordinates of an initial point from the coordinates of a terminal point. N‐VM.3. (+) Solve problems involving velocity and other quantities that can be represented by vectors. N‐VM.4. (+) Add and subtract vectors. a. Add vectors end‐to‐ ...
... N‐VM.2. (+) Find the components of a vector by subtracting the coordinates of an initial point from the coordinates of a terminal point. N‐VM.3. (+) Solve problems involving velocity and other quantities that can be represented by vectors. N‐VM.4. (+) Add and subtract vectors. a. Add vectors end‐to‐ ...

Lecture 1 Linear Superalgebra
... where I is the p|q × p|q identity matrix (ones down the diagonal, zeros elsewhere) and ǫ2 = 0. An easy calculation then exposes the super trace formula with the negative sign. Using this calculation one can easily show that: str(ST ) = str(T S) and we shall leave this as an exercise to the reader. T ...
... where I is the p|q × p|q identity matrix (ones down the diagonal, zeros elsewhere) and ǫ2 = 0. An easy calculation then exposes the super trace formula with the negative sign. Using this calculation one can easily show that: str(ST ) = str(T S) and we shall leave this as an exercise to the reader. T ...

linear algebra in a nutshell
... Definition: The column space contains all combinations of the columns. In other words, C (A) contains all possible products A times x. Therefore Ax = b is solvable exactly when the vector b is in the column space C (A). For an m by n matrix, the columns have m components. The column space of A is in ...
... Definition: The column space contains all combinations of the columns. In other words, C (A) contains all possible products A times x. Therefore Ax = b is solvable exactly when the vector b is in the column space C (A). For an m by n matrix, the columns have m components. The column space of A is in ...

Lecture notes
... Two matrices can be multiplied together, if the number of columns of the first matrix is equal to the number of rows of the second matrix. ...
... Two matrices can be multiplied together, if the number of columns of the first matrix is equal to the number of rows of the second matrix. ...







Math 210B. Homework 4 1. (i) If X is a topological space and a
... of X admits a finite subcover) and that any subspace Y ⊂ X is noetherian. (iii) Conversely to (ii), if every subspace of a topological space X is quasi-compact then prove X is noetherian. 2. Over a field k = k with char(k) 6= 2, decompose Z(y 4 − x2 , y 4 − x2 y 2 + xy 2 − x3 ) ⊂ k 2 and Z(u2 + v 2 ...
... of X admits a finite subcover) and that any subspace Y ⊂ X is noetherian. (iii) Conversely to (ii), if every subspace of a topological space X is quasi-compact then prove X is noetherian. 2. Over a field k = k with char(k) 6= 2, decompose Z(y 4 − x2 , y 4 − x2 y 2 + xy 2 − x3 ) ⊂ k 2 and Z(u2 + v 2 ...





14.4 - Green`s Theorem two-dimensional curl dimensional
... , which is exactly what is used for a spherical coordinate triple integral! This will be dA here. Even though the sphere is parameterized with spherical coordinates, do not multiply in another factor of ρ2 sin φ. It's a regular, rectangular double integral with bounds for φ and θ ...
... , which is exactly what is used for a spherical coordinate triple integral! This will be dA here. Even though the sphere is parameterized with spherical coordinates, do not multiply in another factor of ρ2 sin φ. It's a regular, rectangular double integral with bounds for φ and θ ...


Basis (linear algebra)

Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.