



Two new direct linear solvers in the QR family
... As explained in the section Definitions, the matrices Ms will effect an orthonormalization procedure on the columns of A. Observe that A′ can be used in a projection operator to compute bc = A′ (A′ )∗ b, and the equation to be solved can now be written A′ M −1 x = A′ (A′ )∗ b A[x − M(A′ )∗ b] = 0 Th ...
... As explained in the section Definitions, the matrices Ms will effect an orthonormalization procedure on the columns of A. Observe that A′ can be used in a projection operator to compute bc = A′ (A′ )∗ b, and the equation to be solved can now be written A′ M −1 x = A′ (A′ )∗ b A[x − M(A′ )∗ b] = 0 Th ...

Equiangular Lines
... both sides at ui , the only term that survives is the i-th term, and we get ci (1 − α2 ) = 0. Thus ci = 0 for i = 1, 2, . . . , k. We have shown that f1 , f2 , . . . , fk are linearly independent. However, these polynomials all belong to the space of homogeneous polynomials of degree 2 in X, Y, Z: ...
... both sides at ui , the only term that survives is the i-th term, and we get ci (1 − α2 ) = 0. Thus ci = 0 for i = 1, 2, . . . , k. We have shown that f1 , f2 , . . . , fk are linearly independent. However, these polynomials all belong to the space of homogeneous polynomials of degree 2 in X, Y, Z: ...

Math 601 Solutions to Homework 3
... Thus, αA ∈ S3 . Thus, S3 is closed under scalar multiplication. (2) Closed under addition: Suppose that A and B are matrices in S3 . Then, M A = AM and M B = BM . Consider A + B. We would like to show that M (A+B) = (A+B)M . This follows from the properties of matrix multiplication and the assumptio ...
... Thus, αA ∈ S3 . Thus, S3 is closed under scalar multiplication. (2) Closed under addition: Suppose that A and B are matrices in S3 . Then, M A = AM and M B = BM . Consider A + B. We would like to show that M (A+B) = (A+B)M . This follows from the properties of matrix multiplication and the assumptio ...




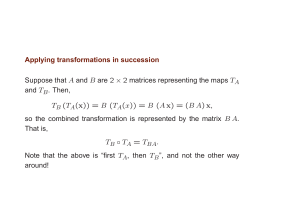
Applying transformations in succession Suppose that A and B are 2
... The matrix for a rotation or a reflection is invertible: their determinants are non-zero. Suppose that A is the 2 × 2 matrix representing TA, and it has inverse A−1. Then TA−1 (TA (x)) = A−1(Ax) = (A−1A)x = I2x = x, and similarly, TA(TA−1 (x)) = x. So to get the matrix for the inverse, we just take ...
... The matrix for a rotation or a reflection is invertible: their determinants are non-zero. Suppose that A is the 2 × 2 matrix representing TA, and it has inverse A−1. Then TA−1 (TA (x)) = A−1(Ax) = (A−1A)x = I2x = x, and similarly, TA(TA−1 (x)) = x. So to get the matrix for the inverse, we just take ...

Notes - Cornell Computer Science
... Aside: Subspaces A matrix has four subspaces associated with it: the range, the null space and the orthogonal complements of these two spaces. The range is the set of everything you can produce by multiplying vectors by A. This is the span of the columns of A: ran(A) = {Ax|x ∈ IRn } null(A) = {x|Ax ...
... Aside: Subspaces A matrix has four subspaces associated with it: the range, the null space and the orthogonal complements of these two spaces. The range is the set of everything you can produce by multiplying vectors by A. This is the span of the columns of A: ran(A) = {Ax|x ∈ IRn } null(A) = {x|Ax ...


Final Exam Review
... 11. Consider force vectors u & v acting on the same point. Find the resultant magnitude and angle Ѳ. ‖ ‖ = 620 pounds, Ѳ = 146o ‖ ‖ = 840 pounds, Ѳ = 278o 12. Change the rectangular coordinate to a polar coordinate (round to the tenth place) (-8,-2) … where 0 < Ѳ < 360o 13. Change the polar coordina ...
... 11. Consider force vectors u & v acting on the same point. Find the resultant magnitude and angle Ѳ. ‖ ‖ = 620 pounds, Ѳ = 146o ‖ ‖ = 840 pounds, Ѳ = 278o 12. Change the rectangular coordinate to a polar coordinate (round to the tenth place) (-8,-2) … where 0 < Ѳ < 360o 13. Change the polar coordina ...


Algebra Quals Fall 2012 1. This is an immediate consequence of the
... are a basis, then a − ci a = 0 gives an equation that a satisfies, which must divide f since a is a root of f . Consider the equation aq = b, let c = N (a), so cq = bd . Since gcd(q, d) = 1, there exist r, s such that sq + rd = 1, so b = bsq+rd = bsq crq = (bs cr )q , so b is a q − th power, and (a/ ...
... are a basis, then a − ci a = 0 gives an equation that a satisfies, which must divide f since a is a root of f . Consider the equation aq = b, let c = N (a), so cq = bd . Since gcd(q, d) = 1, there exist r, s such that sq + rd = 1, so b = bsq+rd = bsq crq = (bs cr )q , so b is a q − th power, and (a/ ...

Linear codes, generator matrices, check matrices, cyclic codes
... The big trick in study of cyclic codes is to realize that the cycling forward has a useful interpretation in terms of polynomial algebra. Interpret a length n vector v = (v0 , v1 , . . . , vn−1 ) as a polynomial p(x) = vo +v1 x+v2 x2 +. . .+vn−2 xn−2 +vn−1 xn−1 with coefficients in ascending order. ...
... The big trick in study of cyclic codes is to realize that the cycling forward has a useful interpretation in terms of polynomial algebra. Interpret a length n vector v = (v0 , v1 , . . . , vn−1 ) as a polynomial p(x) = vo +v1 x+v2 x2 +. . .+vn−2 xn−2 +vn−1 xn−1 with coefficients in ascending order. ...



1= 1 A = I - American Statistical Association
... further "streamlining" is possible by working with the symmetric matrix A', which, in essence, merely exhibits the usual "normal" equations. This kind of procedure is easily explained without reference to the pseudoinverse, and is probably the simplest approach for small sized calculations. In large ...
... further "streamlining" is possible by working with the symmetric matrix A', which, in essence, merely exhibits the usual "normal" equations. This kind of procedure is easily explained without reference to the pseudoinverse, and is probably the simplest approach for small sized calculations. In large ...


MTH 100 CBI - Shelton State
... downwards, be horizontal, or be vertical). • One strategy for graphing a linear equation is to create a table of values. • In a table of values, one half of the ordered pair (either x or y) is given, and the other half is solved for in the equation. • Once the ordered pairs have been completed, thei ...
... downwards, be horizontal, or be vertical). • One strategy for graphing a linear equation is to create a table of values. • In a table of values, one half of the ordered pair (either x or y) is given, and the other half is solved for in the equation. • Once the ordered pairs have been completed, thei ...


MA 242
... and then use the second derivative test to determine if each critical point corresponds to a local extreme value or a saddle point of the function. [ HINT: There are exactly 2 critical points.] SOLUTION: The two critical points are (0, 0) and (4/3, 4/3) . Computing the function D(x, y) = fxx fyy − [ ...
... and then use the second derivative test to determine if each critical point corresponds to a local extreme value or a saddle point of the function. [ HINT: There are exactly 2 critical points.] SOLUTION: The two critical points are (0, 0) and (4/3, 4/3) . Computing the function D(x, y) = fxx fyy − [ ...
Basis (linear algebra)

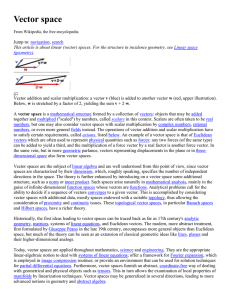
Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.