
A Ramsey space of infinite polyhedra and the random polyhedron
... A polyhedron is a geometric object built up through a finite or countable number of suitable amalgamations of convex hulls of finite sets; polyhedra are generated in this way by simplexes. Simplicial morphisms are locally linear maps that preserve vertices. An ordered polyhedron is a polyhedron for ...
... A polyhedron is a geometric object built up through a finite or countable number of suitable amalgamations of convex hulls of finite sets; polyhedra are generated in this way by simplexes. Simplicial morphisms are locally linear maps that preserve vertices. An ordered polyhedron is a polyhedron for ...
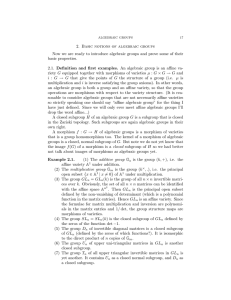
2. Basic notions of algebraic groups Now we are ready to introduce
... let ! : k[T ] → k be the evaluation map at the identity element of Ga , i.e. !(T ) = 0. Then, µ∗ , ! and i∗ give the comultiplication, counit and antipode making the algebra k[T ] into a commutative Hopf algebra. (Big aside: definition of Hopf algebra if you’ve never seen it before. A coalgebra is a ...
... let ! : k[T ] → k be the evaluation map at the identity element of Ga , i.e. !(T ) = 0. Then, µ∗ , ! and i∗ give the comultiplication, counit and antipode making the algebra k[T ] into a commutative Hopf algebra. (Big aside: definition of Hopf algebra if you’ve never seen it before. A coalgebra is a ...
Artin E. Galois Theo..
... will have a unique solution if they have any solution, since the difference, term by term, of two distinct solutions would be a non-trivial solution of the homogeneous equations. A solution would exist since the n independent column vectors form a generating system for the n-dimensional space of col ...
... will have a unique solution if they have any solution, since the difference, term by term, of two distinct solutions would be a non-trivial solution of the homogeneous equations. A solution would exist since the n independent column vectors form a generating system for the n-dimensional space of col ...

DESCRIPTIVE TOPOLOGY IN NON
... DESCRIPTIVE TOPOLOGY IN NON-ARCHIMEDEAN FUNCTION SPACES Cp (X, K). PART I J. KA̧KOL, W. ŚLIWA Abstract. Let K be a non-archimedean field and let X be an ultraregular space. We study the non-archimedean locally convex space Cp (X, K) of all K-valued continuous functions on X endowed with the pointwi ...
... DESCRIPTIVE TOPOLOGY IN NON-ARCHIMEDEAN FUNCTION SPACES Cp (X, K). PART I J. KA̧KOL, W. ŚLIWA Abstract. Let K be a non-archimedean field and let X be an ultraregular space. We study the non-archimedean locally convex space Cp (X, K) of all K-valued continuous functions on X endowed with the pointwi ...

An efficient algorithm for computing the Baker–Campbell–Hausdorff
... differential equations or when one wants to study specific features of the series, such as the distribution of the coefficients and other combinatorial properties.32 Of course, it is always possible to express the resulting formulas in terms of a basis of L共X , Y兲 but this rewriting process is very ...
... differential equations or when one wants to study specific features of the series, such as the distribution of the coefficients and other combinatorial properties.32 Of course, it is always possible to express the resulting formulas in terms of a basis of L共X , Y兲 but this rewriting process is very ...



Cones on homotopy probability spaces
... is an L∞ morphism KX : Cn → C, whose value on ei1 ⊙ · · · ⊙ eik ∈ S k Cn precisely equals the classically defined cumulant KXk (ei1 ⊙ · · · ⊙ eik ) = ck (xi1 , . . . , xin ) . Now let V → CV → C be an algebraic cone on V . Because the first map is an algebra map, Proposition 3.4 applies and the cumu ...
... is an L∞ morphism KX : Cn → C, whose value on ei1 ⊙ · · · ⊙ eik ∈ S k Cn precisely equals the classically defined cumulant KXk (ei1 ⊙ · · · ⊙ eik ) = ck (xi1 , . . . , xin ) . Now let V → CV → C be an algebraic cone on V . Because the first map is an algebra map, Proposition 3.4 applies and the cumu ...

Introduction - SUST Repository
... In this chapter we define some notations and concepts and state some wellknown results which will be used later on and we begin by the concept of groups. Group theory is the abstraction of ideas that were common to a number of major areas which were being studied essentially simultaneously .The thre ...
... In this chapter we define some notations and concepts and state some wellknown results which will be used later on and we begin by the concept of groups. Group theory is the abstraction of ideas that were common to a number of major areas which were being studied essentially simultaneously .The thre ...


Convex Sets Strict Separation in Hilbert Spaces
... Dem: Every characterization of this kind results form a variational argument. So, suppose that z is the only closest point in C, guaranteed by ...
... Dem: Every characterization of this kind results form a variational argument. So, suppose that z is the only closest point in C, guaranteed by ...



View Full File
... A new efficient algorithm for computing Gröbner bases which is to avoid as much intermediate computation as possible, the algorithm computes successive truncated Gröbner bases and it replaces the classical polynomial reduction found in the Buchberger algorithm by the simultaneous reduction of severa ...
... A new efficient algorithm for computing Gröbner bases which is to avoid as much intermediate computation as possible, the algorithm computes successive truncated Gröbner bases and it replaces the classical polynomial reduction found in the Buchberger algorithm by the simultaneous reduction of severa ...





1 SUBSPACE TEST Strategy: We want to see if H is a
... Strategy: We want to see if H is a subspace of V. 1.) Is the zero vector of V also in H? If no, then H is not a subspace of V. If yes, then move on to step 2. 2.) Identify c, u , v , and list any “facts”. 3.) Is u + v in H? If yes, then move on to step 4. If no, then give a specific example to show ...
... Strategy: We want to see if H is a subspace of V. 1.) Is the zero vector of V also in H? If no, then H is not a subspace of V. If yes, then move on to step 2. 2.) Identify c, u , v , and list any “facts”. 3.) Is u + v in H? If yes, then move on to step 4. If no, then give a specific example to show ...

Chapter 5: Solving Systems of Linear Equations
... A system of linear equations is a set of two or more linear equations in the same variables. A solution of a system of linear equations in two variables is an ordered pair that is a solution of each equation in the system. A linear inequality in two variables, x and y, can be written as ax + by < c, ...
... A system of linear equations is a set of two or more linear equations in the same variables. A solution of a system of linear equations in two variables is an ordered pair that is a solution of each equation in the system. A linear inequality in two variables, x and y, can be written as ax + by < c, ...

Isometries of the plane - math.jacobs
... pairs of regular polyhedra have the same numbers V , E, F , but in different order; another observation is that V − E + F = 2. We start with the second statement. It is more general, because it concerns not only regular polyhedra but all convex polyhedra (and many non-convex polyhedra as well). Theo ...
... pairs of regular polyhedra have the same numbers V , E, F , but in different order; another observation is that V − E + F = 2. We start with the second statement. It is more general, because it concerns not only regular polyhedra but all convex polyhedra (and many non-convex polyhedra as well). Theo ...


Introduction to Matrix Algebra
... For each λ, one can define a nonzero vector a, such that (C − λ I)a = 0. The 0 to the right of the equal sign denotes a vector filled with 0s. Any number in a that satisfies this equation is called a latent vector or eigenvector of matrix C. Each eigenvector is associated with its own λ. Note that t ...
... For each λ, one can define a nonzero vector a, such that (C − λ I)a = 0. The 0 to the right of the equal sign denotes a vector filled with 0s. Any number in a that satisfies this equation is called a latent vector or eigenvector of matrix C. Each eigenvector is associated with its own λ. Note that t ...
Dynamical systems: Multiply recurrent points
... In this section, we study the notion of a multiply recurrent point in a dynamical system. Unless for the notion of (uniformly) recurrent points, we can show existence of such points only under additional conditions on a dynamical system. 12.1. Definition Let X be a dynamical system over S and e a su ...
... In this section, we study the notion of a multiply recurrent point in a dynamical system. Unless for the notion of (uniformly) recurrent points, we can show existence of such points only under additional conditions on a dynamical system. 12.1. Definition Let X be a dynamical system over S and e a su ...
Basis (linear algebra)

Basis vector redirects here. For basis vector in the context of crystals, see crystal structure. For a more general concept in physics, see frame of reference.A set of vectors in a vector space V is called a basis, or a set of basis vectors, if the vectors are linearly independent and every vector in the vector space is a linear combination of this set. In more general terms, a basis is a linearly independent spanning set.Given a basis of a vector space V, every element of V can be expressed uniquely as a linear combination of basis vectors, whose coefficients are referred to as vector coordinates or components. A vector space can have several distinct sets of basis vectors; however each such set has the same number of elements, with this number being the dimension of the vector space.