

Review - Weebly
... • A toy rocket is in projectile motion, so that it is on track to land 30 m from its launch point. While in the air, the rocket explodes into two identical pieces, one of which lands 35 m from its launch point. Where does the first piece land? • 25 m from its launch point. Since the only external fo ...
... • A toy rocket is in projectile motion, so that it is on track to land 30 m from its launch point. While in the air, the rocket explodes into two identical pieces, one of which lands 35 m from its launch point. Where does the first piece land? • 25 m from its launch point. Since the only external fo ...

Ch 8.1 and 8.2 chap 8.1
... Which truck will experience the greatest impulse? Which truck will experience the greatest change in momentum? Which truck will experience the greatest force? Which truck will experience the greatest acceleration? Which truck will experience the greatest change in velocity? Which truck would you rat ...
... Which truck will experience the greatest impulse? Which truck will experience the greatest change in momentum? Which truck will experience the greatest force? Which truck will experience the greatest acceleration? Which truck will experience the greatest change in velocity? Which truck would you rat ...


Name
... 42. A uniform bridge span weighs 50 x 103 N and is 40.0 m long. An automobile weighing 15 x 103 N is parked with its center of gravity located 12.0 m from the right pier. What upward support force is provided by the left pier? 43. A child wants to use a 10 kg board that is 3.5 m long as a seesaw. S ...
... 42. A uniform bridge span weighs 50 x 103 N and is 40.0 m long. An automobile weighing 15 x 103 N is parked with its center of gravity located 12.0 m from the right pier. What upward support force is provided by the left pier? 43. A child wants to use a 10 kg board that is 3.5 m long as a seesaw. S ...

Slide 1
... various round rigid bodies by releasing them from rest at the top of an inclined plane. What shape should a boby have to reach the bottom of the incline first? The smaller the moment of inertia the body has, the faster the body is moving at the bottom because they have less of their kinetic energy t ...
... various round rigid bodies by releasing them from rest at the top of an inclined plane. What shape should a boby have to reach the bottom of the incline first? The smaller the moment of inertia the body has, the faster the body is moving at the bottom because they have less of their kinetic energy t ...




NEWTON’S LAWS OF MOTION
... · A force is a push or pull (vector quantity). Units of force of Newtons (N) or kgm/s 2 . · An external force is an applied force, such as kicking a ball. An internal force is a force from within an object, such as pushing on the dashboard of a car from inside the car. External forces cause m ...
... · A force is a push or pull (vector quantity). Units of force of Newtons (N) or kgm/s 2 . · An external force is an applied force, such as kicking a ball. An internal force is a force from within an object, such as pushing on the dashboard of a car from inside the car. External forces cause m ...









Document
... For elastic collisions with object 2 at rest: (Example) • If m1 > m2 then both head off in same direction, 2 faster than 1 • If m2 > m1 then 1 bounces back and 2 is slower than 1 • If m2 = m1 then velocities swap! 1 stops and 2 moves forward ...
... For elastic collisions with object 2 at rest: (Example) • If m1 > m2 then both head off in same direction, 2 faster than 1 • If m2 > m1 then 1 bounces back and 2 is slower than 1 • If m2 = m1 then velocities swap! 1 stops and 2 moves forward ...
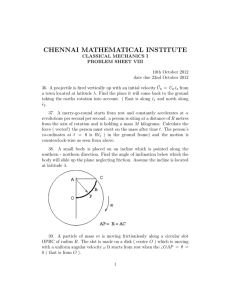
Chapter 10: Dynamics of Rotational Motion
... Joule it is customary to leave torque expressed in N·m (or foot·pounds). Engineers will often use the term "moment" to describe what physicists call a "torque". We will adopt a convention that defines torques that tend to cause clockwise rotation as negative and torques that tend to cause counterclo ...
... Joule it is customary to leave torque expressed in N·m (or foot·pounds). Engineers will often use the term "moment" to describe what physicists call a "torque". We will adopt a convention that defines torques that tend to cause clockwise rotation as negative and torques that tend to cause counterclo ...



L10_rotation
... The diagram shows the positions at evenly-separated times of an object in uniform circular motion. Which shows its acceleration vectors at ...
... The diagram shows the positions at evenly-separated times of an object in uniform circular motion. Which shows its acceleration vectors at ...

File - Akers Physics
... • Inertial mass (translational inertia) is an object’s ability to resist a linear acceleration. • Moment of inertia (rotational inertia) is an objects resistance to a rotational acceleration. • Objects that have most of their mass near their axis of rotation have smaller rotational inertias than obj ...
... • Inertial mass (translational inertia) is an object’s ability to resist a linear acceleration. • Moment of inertia (rotational inertia) is an objects resistance to a rotational acceleration. • Objects that have most of their mass near their axis of rotation have smaller rotational inertias than obj ...
Relativistic angular momentum

""Angular momentum tensor"" redirects to here.In physics, relativistic angular momentum refers to the mathematical formalisms and physical concepts that define angular momentum in special relativity (SR) and general relativity (GR). The relativistic quantity is subtly different from the three-dimensional quantity in classical mechanics.Angular momentum is a dynamical quantity derived from position and momentum, and is important; angular momentum is a measure of an object's ""amount of rotational motion"" and resistance to stop rotating. Also, in the same way momentum conservation corresponds to translational symmetry, angular momentum conservation corresponds to rotational symmetry – the connection between symmetries and conservation laws is made by Noether's theorem. While these concepts were originally discovered in classical mechanics – they are also true and significant in special and general relativity. In terms of abstract algebra; the invariance of angular momentum, four-momentum, and other symmetries in spacetime, are described by the Poincaré group and Lorentz group.Physical quantities which remain separate in classical physics are naturally combined in SR and GR by enforcing the postulates of relativity, an appealing characteristic. Most notably; space and time coordinates combine into the four-position, and energy and momentum combine into the four-momentum. These four-vectors depend on the frame of reference used, and change under Lorentz transformations to other inertial frames or accelerated frames.Relativistic angular momentum is less obvious. The classical definition of angular momentum is the cross product of position x with momentum p to obtain a pseudovector x×p, or alternatively as the exterior product to obtain a second order antisymmetric tensor x∧p. What does this combine with, if anything? There is another vector quantity not often discussed – it is the time-varying moment of mass (not the moment of inertia) related to the boost of the centre of mass of the system, and this combines with the classical angular momentum to form an antisymmetric tensor of second order. For rotating mass–energy distributions (such as gyroscopes, planets, stars, and black holes) instead of point-like particles, the angular momentum tensor is expressed in terms of the stress–energy tensor of the rotating object.In special relativity alone, in the rest frame of a spinning object; there is an intrinsic angular momentum analogous to the ""spin"" in quantum mechanics and relativistic quantum mechanics, although for an extended body rather than a point particle. In relativistic quantum mechanics, elementary particles have spin and this is an additional contribution to the orbital angular momentum operator, yielding the total angular momentum tensor operator. In any case, the intrinsic ""spin"" addition to the orbital angular momentum of an object can be expressed in terms of the Pauli–Lubanski pseudovector.