
Skill Phases for
... Weight Transfer momentum and stability Chaining angular momentum is transferred in the body from one set of muscle groups to another Lever action for speed or force ...
... Weight Transfer momentum and stability Chaining angular momentum is transferred in the body from one set of muscle groups to another Lever action for speed or force ...



Slide 1
... is placed on the beam at a distance x m from B, such that the normal reaction at P is double the reaction at B. Find the distance x. N 2N A ...
... is placed on the beam at a distance x m from B, such that the normal reaction at P is double the reaction at B. Find the distance x. N 2N A ...

Torque Web Quest
... – Solid cylinder: I = (1/2) MR2 (use for part II in lab) – Hollow sphere: I = (2/3) MR2 – Solid sphere: I = (2/5) MR2 ...
... – Solid cylinder: I = (1/2) MR2 (use for part II in lab) – Hollow sphere: I = (2/3) MR2 – Solid sphere: I = (2/5) MR2 ...

File - IBT LUMHS
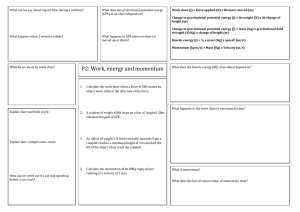
... heavy truck moving fast has a large momentum—it takes a large and prolonged force to get the truck up to this speed, and it takes a large and prolonged force to bring it to a stop afterwards. If the truck were lighter, or moving more slowly, then it would have less momentum. • Like velocity, linear ...
... heavy truck moving fast has a large momentum—it takes a large and prolonged force to get the truck up to this speed, and it takes a large and prolonged force to bring it to a stop afterwards. If the truck were lighter, or moving more slowly, then it would have less momentum. • Like velocity, linear ...


Ch8 Rotational Motion
... Torque is a vector. It comes in clockwise and counter-clock wise directions. Unit of torque = N•m P: A force of 40 N is applied at the end of a wrench handle of length 20 cm in a direction perpendicular to the handle as shown above. What is the torque applied to the nut? ...
... Torque is a vector. It comes in clockwise and counter-clock wise directions. Unit of torque = N•m P: A force of 40 N is applied at the end of a wrench handle of length 20 cm in a direction perpendicular to the handle as shown above. What is the torque applied to the nut? ...



18 Lecture 18: Central forces and angular momentum
... to a plane. To see this observe that the angular momentum vector as defined in (303) is perpendicular to both the momentum and the position vectors. The momentum p(t) and position r(t) of the particle at a given time t define a plane, and L(t) is perpendicular to this plane. Because the vector L(t) ...
... to a plane. To see this observe that the angular momentum vector as defined in (303) is perpendicular to both the momentum and the position vectors. The momentum p(t) and position r(t) of the particle at a given time t define a plane, and L(t) is perpendicular to this plane. Because the vector L(t) ...


Slide 1
... • If no net external torque acts on a system of particles, the total angular momentum of the system is conserved (constant) • This rule applies independently to all components ...
... • If no net external torque acts on a system of particles, the total angular momentum of the system is conserved (constant) • This rule applies independently to all components ...




lecture14
... Moment of Inertia, IA • The sum of squared distances from point A to each other point in the body, and each squared distance is scaled by the mass of each point Ai 2 i A ...
... Moment of Inertia, IA • The sum of squared distances from point A to each other point in the body, and each squared distance is scaled by the mass of each point Ai 2 i A ...

Dynamics of a System of Particles
... inertial system but it does not rotate relative to the inertial system. This frame of reference is called the centre-of-mass frame of reference. In case of isolated system the centre-of-mass frame of reference is an inertial system. Consider again the definition of the centre of mass, and take the t ...
... inertial system but it does not rotate relative to the inertial system. This frame of reference is called the centre-of-mass frame of reference. In case of isolated system the centre-of-mass frame of reference is an inertial system. Consider again the definition of the centre of mass, and take the t ...

PowerPoint
... • Figure out all forces and their points of application • Sum all forces and divide by mass to find COM’s linear acceleration • For each force, compute perp-dot-product from COM to point of force application and add value into total torque of COM • Divide total torque by the MOI at the COM to find a ...
... • Figure out all forces and their points of application • Sum all forces and divide by mass to find COM’s linear acceleration • For each force, compute perp-dot-product from COM to point of force application and add value into total torque of COM • Divide total torque by the MOI at the COM to find a ...




Relativistic angular momentum

""Angular momentum tensor"" redirects to here.In physics, relativistic angular momentum refers to the mathematical formalisms and physical concepts that define angular momentum in special relativity (SR) and general relativity (GR). The relativistic quantity is subtly different from the three-dimensional quantity in classical mechanics.Angular momentum is a dynamical quantity derived from position and momentum, and is important; angular momentum is a measure of an object's ""amount of rotational motion"" and resistance to stop rotating. Also, in the same way momentum conservation corresponds to translational symmetry, angular momentum conservation corresponds to rotational symmetry – the connection between symmetries and conservation laws is made by Noether's theorem. While these concepts were originally discovered in classical mechanics – they are also true and significant in special and general relativity. In terms of abstract algebra; the invariance of angular momentum, four-momentum, and other symmetries in spacetime, are described by the Poincaré group and Lorentz group.Physical quantities which remain separate in classical physics are naturally combined in SR and GR by enforcing the postulates of relativity, an appealing characteristic. Most notably; space and time coordinates combine into the four-position, and energy and momentum combine into the four-momentum. These four-vectors depend on the frame of reference used, and change under Lorentz transformations to other inertial frames or accelerated frames.Relativistic angular momentum is less obvious. The classical definition of angular momentum is the cross product of position x with momentum p to obtain a pseudovector x×p, or alternatively as the exterior product to obtain a second order antisymmetric tensor x∧p. What does this combine with, if anything? There is another vector quantity not often discussed – it is the time-varying moment of mass (not the moment of inertia) related to the boost of the centre of mass of the system, and this combines with the classical angular momentum to form an antisymmetric tensor of second order. For rotating mass–energy distributions (such as gyroscopes, planets, stars, and black holes) instead of point-like particles, the angular momentum tensor is expressed in terms of the stress–energy tensor of the rotating object.In special relativity alone, in the rest frame of a spinning object; there is an intrinsic angular momentum analogous to the ""spin"" in quantum mechanics and relativistic quantum mechanics, although for an extended body rather than a point particle. In relativistic quantum mechanics, elementary particles have spin and this is an additional contribution to the orbital angular momentum operator, yielding the total angular momentum tensor operator. In any case, the intrinsic ""spin"" addition to the orbital angular momentum of an object can be expressed in terms of the Pauli–Lubanski pseudovector.