
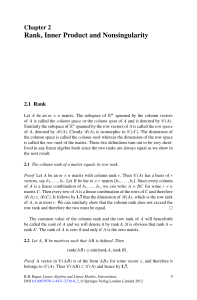
Homogeneous Solutions
... the values of am+2, am+3,...can be computed similarly. am-k-1: am-k-1=-1/Ck[C0am-1+ C1am-2+...+ Ck-1am-k - f(m-1)] am-k-2: am-k-2=-1/Ck[C0am-2+ C1am-3+...+ Ck-1am-k-1 - f(m-2)] The value of am-k-3, am-k-4,...can be computed similarly. Case II: Fewer than k values of the numeric function will not b ...
... the values of am+2, am+3,...can be computed similarly. am-k-1: am-k-1=-1/Ck[C0am-1+ C1am-2+...+ Ck-1am-k - f(m-1)] am-k-2: am-k-2=-1/Ck[C0am-2+ C1am-3+...+ Ck-1am-k-1 - f(m-2)] The value of am-k-3, am-k-4,...can be computed similarly. Case II: Fewer than k values of the numeric function will not b ...

![[hal-00137158, v1] Well known theorems on triangular systems and](http://s1.studyres.com/store/data/015177460_1-823a690e284005713c70fc9e95ccaaf8-300x300.png)






Checking Polynomial Identities over any Field: Towards a
... in only polynomial time. For example, the determinant can be evaluated in polynomial time, as can a polynomial-sized product of polynomials. Many randomized methods for checking polynomial identities have been discovered based on the assumption that the polynomials can be evaluated efficiently. The ...
... in only polynomial time. For example, the determinant can be evaluated in polynomial time, as can a polynomial-sized product of polynomials. Many randomized methods for checking polynomial identities have been discovered based on the assumption that the polynomials can be evaluated efficiently. The ...




Transformasi Linear dan Isomorfisma pada Aljabar Max
... Transformasi Linear dan Isomorfisma pada Aljabar Max-Plus (Linear Transformation and Isomorphism in Max-plus Algebra) As in conventional linear algebra we can define the linear dependence and independence of vectors in the max-plus sense. The following can be found in [1], [2], [3] and [4]. Recall t ...
... Transformasi Linear dan Isomorfisma pada Aljabar Max-Plus (Linear Transformation and Isomorphism in Max-plus Algebra) As in conventional linear algebra we can define the linear dependence and independence of vectors in the max-plus sense. The following can be found in [1], [2], [3] and [4]. Recall t ...







Precal Honors Pacing
... Arithmetic with Polynomial and Rational Expressions PC.AREI.8 Represent a system of linear equations as a single matrix equation in a vector variable. PC.AREI.9 Using technology for matrices of dimension 3 x 3 or greater, find the inverse of a matrix if it exists and use it to solve systems of linea ...
... Arithmetic with Polynomial and Rational Expressions PC.AREI.8 Represent a system of linear equations as a single matrix equation in a vector variable. PC.AREI.9 Using technology for matrices of dimension 3 x 3 or greater, find the inverse of a matrix if it exists and use it to solve systems of linea ...

