


Notes on Galois Theory
... Definition: Given elements α1 , . . . , αn in an extension L of a field K, we define K[α1 , . . . , αn ] = the smallest subring of L containing K and α1 , . . . , αn K(α1 , . . . , αn ) = the smallest subfield of L containing K and α1 , . . . , αn . Note that K[α1 , . . . , αn ] precisely consists ...
... Definition: Given elements α1 , . . . , αn in an extension L of a field K, we define K[α1 , . . . , αn ] = the smallest subring of L containing K and α1 , . . . , αn K(α1 , . . . , αn ) = the smallest subfield of L containing K and α1 , . . . , αn . Note that K[α1 , . . . , αn ] precisely consists ...




Variations on Belyi`s theorem - Universidad Autónoma de Madrid
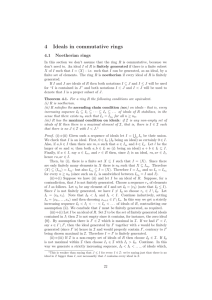
... root of mS (T ), say bi , such that the distance from ui to bi is as small as wanted. If, in particular, we require this distance to be less than 12 min |uj − ui | then the triangle inequality will imply that bi is the only root of mS (T ) satisfying this property. iii) Since mS (T ) is well defined, ...
... root of mS (T ), say bi , such that the distance from ui to bi is as small as wanted. If, in particular, we require this distance to be less than 12 min |uj − ui | then the triangle inequality will imply that bi is the only root of mS (T ) satisfying this property. iii) Since mS (T ) is well defined, ...



![arXiv:math/0607274v2 [math.GT] 21 Jun 2007](http://s1.studyres.com/store/data/004624723_1-689e7c37d19114c6d0cb2b7e64bf5915-300x300.png)







Group theory notes
... is a group also), then we call the subset a subgroup. Every group has two trivial subgroups: the identity element alone and the group itself. The group C4 we discussed earlier has a nontrivial subgroup comprised of the elements {I, b}. The order of a group is equal to the number of group elements. C ...
... is a group also), then we call the subset a subgroup. Every group has two trivial subgroups: the identity element alone and the group itself. The group C4 we discussed earlier has a nontrivial subgroup comprised of the elements {I, b}. The order of a group is equal to the number of group elements. C ...