





solvability conditions for a linearized cahn
... L∞ (R3 ) via Assumption 1 and ∆ua (x) ∈ L2 (R3 ). Similarly ua ∆V ∈ L2 (R3 ) since ua (x) ∈ L∞ (R3 ) and ∆V ∈ L2 (R3 ) (see the Remark after Assumption 2). For the second term in the right side of (2.16) we have ∇ua (x) ∈ L2 (R3 ) and ∇V ∈ L∞ (R3 ) due to Lemma 6 of the Appendix. Hence ∇V.∇ua ∈ L2 ...
... L∞ (R3 ) via Assumption 1 and ∆ua (x) ∈ L2 (R3 ). Similarly ua ∆V ∈ L2 (R3 ) since ua (x) ∈ L∞ (R3 ) and ∆V ∈ L2 (R3 ) (see the Remark after Assumption 2). For the second term in the right side of (2.16) we have ∇ua (x) ∈ L2 (R3 ) and ∇V ∈ L∞ (R3 ) due to Lemma 6 of the Appendix. Hence ∇V.∇ua ∈ L2 ...


1 CHAPTER 3 SYSTEMS OF PARTICLES 3.1 Introduction By
... A given particle may have an external force Fi acting upon it. (It may, of course, have several external forces acting on it, but I mean by Fi the vector sum of all the external forces acting on the ith particle.) It may also interact with the other particles in the system, and consequently it may h ...
... A given particle may have an external force Fi acting upon it. (It may, of course, have several external forces acting on it, but I mean by Fi the vector sum of all the external forces acting on the ith particle.) It may also interact with the other particles in the system, and consequently it may h ...
Version B
... In (b) the same wheel is seen from a reference frame where C is at rest. Now point P is ...
... In (b) the same wheel is seen from a reference frame where C is at rest. Now point P is ...





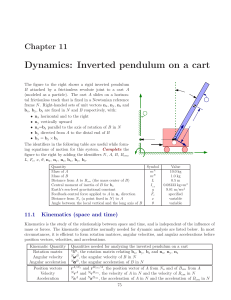
Dynamics: Inverted pendulum on a cart
... B attached by a frictionless revolute joint to a cart A (modeled as a particle). The cart A slides on a horizontal frictionless track that is fixed in a Newtonian reference frame N . Right-handed sets of unit vectors nx , ny , nz and bx , by , bz are fixed in N and B respectively, with: • nx horizonta ...
... B attached by a frictionless revolute joint to a cart A (modeled as a particle). The cart A slides on a horizontal frictionless track that is fixed in a Newtonian reference frame N . Right-handed sets of unit vectors nx , ny , nz and bx , by , bz are fixed in N and B respectively, with: • nx horizonta ...




Differentiation of vectors
... We will use both of the notation grad f and ∇f interchangably. Remark Note that f must be a scalar field for grad f to be defined and grad f itself is a vector field. Example 4.4 Find the gradient of the scalar field f (x, y, z) = x2 y + x cosh yz. ...
... We will use both of the notation grad f and ∇f interchangably. Remark Note that f must be a scalar field for grad f to be defined and grad f itself is a vector field. Example 4.4 Find the gradient of the scalar field f (x, y, z) = x2 y + x cosh yz. ...